太陽能自動跟蹤系統的設計

硬件電路設計
1 跟蹤系統驅動器接口電路
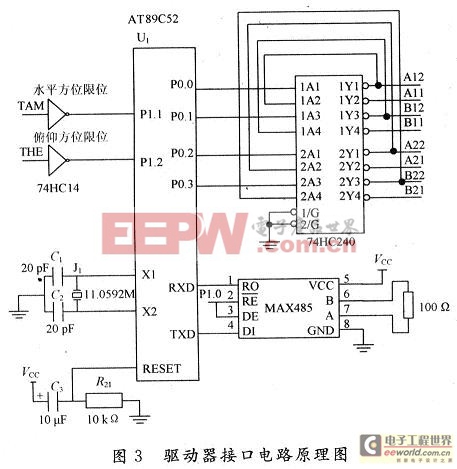
跟蹤系統中微處理器選用89系列性價比高和功耗低的89C52。74HC14芯片是6非門施密特觸發器,與P1.1和P1.2口相連,控制方位限位信號。74HC240芯片,八反相三態緩沖器/線驅動器,用于數據緩沖及總線驅動。系統使用兩片74HC240芯片,通過P0口引腳控制,兩片74HC240的16個輸出引腳作為步進電機驅動電路的輸入控制信號,分別控制步進電機俯仰方向和水平方位的正反轉。系統與上位機的通信選用MAX485接口芯片,由P1.0口控制其收發狀態。驅動器接口電路如圖3所示。
2 步進電機驅動電路
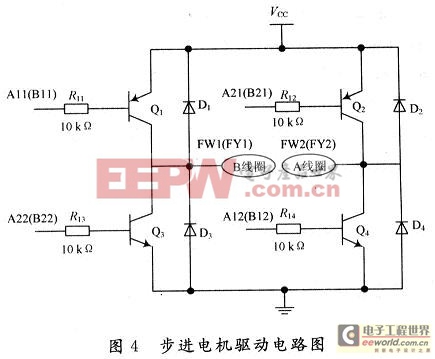
步進電動機是一種用電脈沖信號進行控制,并將電脈沖信號轉換成相應角位移的執行器。在跟蹤系統中,以74HC240的16個輸出信號作為步進電機驅動器的輸入控制信號,用以控制步進電機俯仰方向和水平方位的正反轉。圖4所示的是步進電機一路驅動電路圖,系統共有四路驅動電路,分別驅動步進電機俯仰方向和水平方位的正反轉。
其中,水平方位電機由D7,D6,D5,D4驅動;俯仰方向電機由D3,D2,D1,D0驅動。跟蹤裝置中步進電機選用42BYG250C型,步矩角1.8°。水平俯仰方向步進電機運行的最大角度是360°,共需運行20000步。減速器的傳動比為1:100,即電機轉動100°時水平轉臺相應轉動1°。以步進電機1.8°的步距角計算,當鏡面裝置的水平轉臺轉動1°時,步進電機發出100/1.8個脈沖,由此可以計算平面鏡法向量的方位角為a時步進電機發出的脈沖數為100α/1.8個。步進電機動作頻率可手動設置,默認情況下,步進電機每隔15s動作一次。
3 限位信號采集電路
采用光電耦合器與電壓比較器電路組成的微機步進電機限位電路,其電路圖如圖5所示。
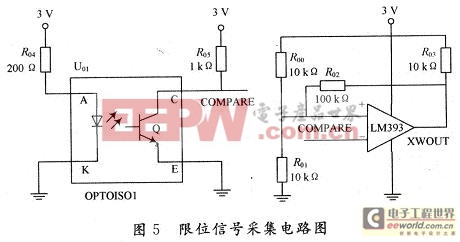
限位電路中利用雙三態門來控制步進電機的脈沖通路。工作原理是:在到達限位位置之前,光耦導通,電壓比較器LM393的反向輸入端有信號,允許步進電機控制脈沖從此通過。當限位桿到達限位位置時,擋住了光耦的光通路,使LM393的反向輸入端無信號,步進電機就停止。
軟件設計
太陽自動跟蹤系統的軟件分為兩部分,一是步進電機控制部分,主要由單片機完成。單片機的軟件設計采用模塊化設計






評論