離散滑模控制在UPS逆變器設(shè)計(jì)中的應(yīng)用

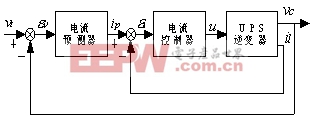
逆變器采取雙環(huán)結(jié)構(gòu)設(shè)計(jì),由電流預(yù)測(cè)器和電流控制器組成,且兩者分別設(shè)計(jì)各自的切換平面,均采用自由順序控制方法。電流預(yù)測(cè)器應(yīng)具有比電流控制器更快的響應(yīng)且對(duì)負(fù)載變化不敏感。電流控制器將具有單邊行為特性以有效的消除了以前采用連續(xù)滑模控制時(shí)出現(xiàn)的抖動(dòng)現(xiàn)象。電流預(yù)測(cè)器通過(guò)跟蹤輸出電壓的誤差估計(jì)出所需的電感電流,電流控制器則用來(lái)調(diào)節(jié)電感電流并產(chǎn)生PWM逆變器的控制信號(hào)。這樣,逆變器將具有限流和固定切換頻率的特性。其控制系統(tǒng)方框圖如圖2所示。
3.1 電流預(yù)測(cè)器設(shè)計(jì)
為了消除輸出電壓的靜態(tài)誤差,在系統(tǒng)滑模平面設(shè)計(jì)中,加入誤差積分項(xiàng)


其中


與(2)聯(lián)立后,設(shè)采樣周期為T,可得到離散系統(tǒng)方程

其中


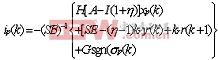
電流預(yù)測(cè)器控制項(xiàng)為

得到控制項(xiàng)。
3.2 電流控制器設(shè)計(jì)
將(1)離散化,其中采樣周期為T,可得

系統(tǒng)的滑模函數(shù)可選為

其中

則電流控制器控制項(xiàng)為


滑模運(yùn)動(dòng)存在性證明與上文相似,并可得到滿足條件0r>1,則系統(tǒng)可在無(wú)抖動(dòng)情況下達(dá)到滑模平面。并可得其控制項(xiàng)為









評(píng)論