電壓、電流的反饋控制模式

現在的高頻開關穩壓電源主要有五種PWM反饋控制模式。電源的輸入電壓、電流等信號在作為取樣控制信號時,大多需經過處理。針對不同的控制模式其處理方式也不同。下面以由VDMOS開關器件構成的穩壓正激型降壓斬波器為例,講述五種PWM反饋控制模式的發展過程、基本工作原理、電路原理示意圖、波形、特點及應用要`氪,以利于選擇應用及仿真建模研究。
(1)電壓反饋控制模式
電壓反饋控制模式是20世紀60年代后期高頻開關穩壓電源剛剛開始發展而采用的一種控制方法。該方法與一些必要的過電流保護電路相結合,至今仍然在工業界被廣泛應用。如圖1(a)所示為Buck降壓斬波器的電壓模式控制原理圖。電壓反饋控制模式只有一個電壓反饋閉環,且采用的是脈沖寬度調制法,即將經電壓誤差放大器放大的慢變化的直流采樣信號與恒定頻率的三角波上斜坡信號相比較,經脈沖寬度調制得到一定寬度的脈沖控制信號,電路的各點波形如圖1(a)所示。逐個脈沖的限流保護電路必須另外附加。電壓反饋控制模式的優點如下。
①PWM三角波幅值較大,脈沖寬度調節時具有較好的抗噪聲裕量。
②占空比調節不受限制。
③對于多路輸出電源而言,它們之間的交互調節特性較好。
④單一反饋電壓閉環的設計、調試比較容易。
⑤對輸出負載的變化有較好的響應調節。
電壓反饋控制模式的缺點如下。
①對輸入電壓的變化動態響應較慢。當輸入電壓突然變小或負載阻抗突然變小時,因為主電路中的輸出電容C及電感L有較大的相移延時作用,輸出電壓的變小也延時滯后,而輸出電壓變小的信息還要經過電壓誤差放大器的補償電路延時滯后,才能傳至PWM比較器將脈寬展寬。這兩個延時滯后作用是動態響應慢的主要原因。
②補償網絡設計本來就較為復雜,閉環增益隨輸入電壓而變化的現象使其更為復雜。
③輸出端的LC濾波器給控制環增加了雙極點,在補償設計誤差放大器時,需要將主極點低頻衰減,或者增加一個零點進行補償。
④在控制磁芯飽和故障狀態方面較為麻煩和復雜。
改善及加快電壓模式控制動態響應速度的方法有兩種:一種是增加電壓誤差放大器的帶寬,以保證其具有一定的高頻增益。但是這樣容易受高頻開關噪聲干擾的影響,需要在主電路及反饋控制電路上采取措施進行抑制或同相位衰減平滑處理。另一種是采用電壓前饋控制模式。電壓前饋控制模式的原理圖如圖1(b)所示。用輸入電壓對電阻、電容(Rt、Ctt)充電,以產生具有可變化的上斜坡的三角波,并且用它取代傳統電壓反饋控制模式中振蕩器產生的固定三角波。此時輸入電壓變化能立刻在脈沖寬度的變化上反映出來,因此該方法明顯提高了由輸入電壓的變化引起的動態響應速度。在該方法中對輸入電壓的前饋控制是開環控制,而對輸出電壓的控制是閉環控制,目的是增加對輸入電壓變化的動態響應速度,故這是一個由開環和閉環構成的雙環控制系統。
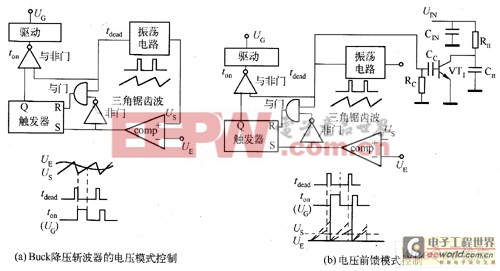
圖1電壓模式控制原理圖
(2)峰值電流反饋控制模式
峰值電流反饋控制模式簡稱峰值電流控制模式,它的概念出現在20世紀60年代后期,來源于原邊具有電流保護功能的單端自激式、反激式高頻開關穩壓電源。20世紀70年代后期才開始從學術上對其進行深人的建模研究。直至20世紀80年代初期,第一批峰值電流控制模式集成電路(UC3842、UC3846)的出現,使得峰值電流控制模式迅速得到了推廣應用,它主要用在了單端及推挽電路方面。近年來,由于大占空比所必需的同步不失真斜坡補償技術在實現上的難度及抗噪聲性能差,峰值電流控制模式面臨著改善性能后的電壓控制模式的挑。如圖2所示,將誤差電壓信號UE送至PWM比較器后,并不是像電壓控制模式那樣與由振蕩電路產生的固定三角波狀電壓斜坡信號進行比較,而是與一個變化的其峰值代表輸出電感電流峰值的三角狀波形或梯形尖角狀合成波形信號叱比較,然后得到PWM脈沖的關斷時刻。因此峰值電流控制模式不是用電壓誤差信號直接控制PWM的脈沖寬度,而是直接控制峰值輸出側的電感電流的大小,然后間接地控制PWM的脈沖寬度。
峰值電流控制模式是一種用固定時鐘開啟、關斷峰值電流的控制方法,這是因為峰值電感電流容易檢測,而且其在邏輯上與平均電感電流大小的變化相一致。但是,峰值電感電流的大小不能與平均電感電流的大小一一對應,因為在占空比不同的情況下,相同的峰值電感電流的大小可以對應不同的平均電感電流大小。而平均電感電流的大小才是唯一決定輸出電壓大小的因素。在數學上可以證明,將電感電流下斜坡斜率的至少一半以上的斜率加在實際檢測電流的上斜坡上,可以去除不同占空比對平均電感電流大小的擾動作用,使得所控制的峰值電感電流最后收斂于平均電感電流。因而合成波形信號UΣ要由斜坡補償信號與實際電感電流信號兩部分合成構成。當外加斜坡補償信號的斜率增加到一定程度時,峰值電流控制模式就會轉化為電壓控制模式。若將斜坡補償信號完全用振蕩電路的三角波代替,就成為了電壓控制模式,只不過此時的電流信號可以認為是一種電流前饋信號,如圖2所示。當輸出電流減小時,峰值電流控制模式就從原理上趨向變為電壓控制模式。當電路處于空載狀態,輸出電流為零,并且斜坡補償信號幅值比較大時,峰值電流控制模式實際上就變為了電壓控制模式。
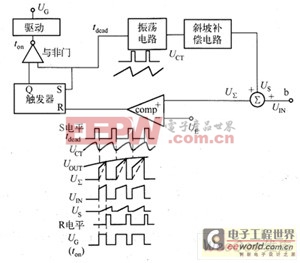
圖2 峰值電流反饋模式控制原理圖
峰值電流控制模式是雙閉環控制系統,即電壓外環控制和電流內環控制。電流內環是瞬日巾決速按照逐個脈沖工作的。在該雙環控制中,電流內環只負責輸出電感的動態變化,因而電壓外環僅需控制輸出電容,不必控制LC儲能電路。基于這些特點,峰值電流控制模式具有比電壓控制模式大得多的帶寬。峰值電流控制模式的優點如下。
①暫態閉環響應較快,對輸入電壓的變化和輸出負載的變化的動態響應均很快。
②控制環易于設計。
③輸入電壓的調整可與電壓控制模式的輸入電壓前饋技術相媲美。
④具有簡單、自動的磁通平衡功能。
⑤具有瞬時峰值電流限流功能,即內在固有的逐個脈沖限流功能。
⑥具有自動均流并聯功能。
峰值電流控制模式的缺點如下。
①占空比大于50%時開環不穩定性,存在難以校正的峰值電流與平均電流的誤差。
②閉環響應不如平均電流控制模式理想。
③容易發生次諧波振蕩,即使占空比小于50%,也有發生高頻次諧波振蕩的可能性,因而需要斜坡補償。
④對噪聲敏感,抗噪聲性差。因為電感處于電流連續工作狀態,與控制電壓編程決定的電流電平相比較,開關器件的電流信號的上斜坡通常較小,電流信號上有較小的噪聲就很容易使得開關器件改變關斷時刻,從而使系統進入次諧波振蕩狀態。
⑤電路拓撲受限制。
⑥對多路輸出電源的交互調節特性不好。
(3)平均電流控制模式
平均電流控制模式的概念產生于20世紀70年代后期。平均電流控制模式集成電路出現在20世紀70年代初期,并成功應用在了20世紀70年代后期的高速CPU專用的具有高di/dt動態響應供電能力的低電壓、大電流高頻開關穩壓電源中。如圖3(a)所示為平均電流控制模式的原理圖。該電路將誤差電壓%接至電流誤差信號放大器(e/a)的同相端,以作為輸出電感電流的控制編程電壓信號Ucp(cp為current-program的縮寫);將帶有鋸齒紋波狀分量的輸出電感電流信號UIN接至電流誤差信號放大器(e/a)的反相端,代表跟蹤電流編程信號Ucp的實際電感平均電流。UIN與UCP的差值經過電流放大器(e/a)放大后,得到平均電流跟蹤誤差信號UCA,再由VCA及三角鋸齒波信號UT或US通過比較器比較后得到PWM關斷信號。UCA的波形與電流波形UIN反相,所以是由UCA的下斜坡(對應于開關器件的導通時期)與三角波UT或US的上斜坡比較產生關斷信號的。顯然這無形中增加了一定的斜坡補償。為了避免次諧波振蕩,UCA的上斜坡不能超過三角鋸齒波信號UT或US的上斜坡。平均電流控制模式的優點如下。
①平均電感電流能夠高度精確地跟蹤電流編程

基爾霍夫電流相關文章:基爾霍夫電流定律
電路相關文章:電路分析基礎
dc相關文章:dc是什么
pwm相關文章:pwm是什么
lc振蕩電路相關文章:lc振蕩電路原理

評論