直流電機(jī)優(yōu)化控制系統(tǒng)設(shè)計(一)

(也即勵磁電流)成反比。這種調(diào)速方法在額定電壓和額定電流下,不同轉(zhuǎn)速時,電機(jī)始終可以輸出額定功率,因此這種方法也稱恒功率調(diào)速。
2.2 PWM可逆控制
PWM可逆控制屬于改變電樞電壓調(diào)速中的一種。自從全控型電力電子器件問世以后,采用脈沖寬度調(diào)制(PWM)的高頻開關(guān)控制方式形成了PWM電機(jī)調(diào)速系統(tǒng),與傳統(tǒng)的V-M(晶閘管-電動機(jī)調(diào)速)系統(tǒng)相比,表現(xiàn)出較大的優(yōu)越性:(1) 主電路線路簡單,需用功率器件少;(2) 開關(guān)頻率高,電流容易連續(xù),諧波少;(3) 調(diào)速性能好,調(diào)速范圍大,低速性能好,穩(wěn)速精度高;(4)效率高,由于功率器件工作在開關(guān)狀態(tài),導(dǎo)通損耗小。由于有上述優(yōu)點,直流電機(jī)PWM調(diào)速系統(tǒng)的應(yīng)用日益廣泛,特別是在中小功率的高動態(tài)性能系統(tǒng)中,已完全取代了V-M系統(tǒng)。為實現(xiàn)電機(jī)的正反轉(zhuǎn),需采用可逆PWM變換器,其主電路有多種形式,最常用的是橋式(也稱H橋)電路。如圖2-1所示:
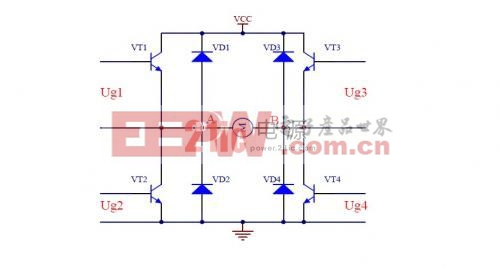
圖2-1 橋式可逆PWM變換器
電機(jī)M兩端電壓UAB隨開關(guān)器件驅(qū)動電壓極性的變化而改變,其控制方式有雙極式、單極式、受限單極式等多種。
雙極性驅(qū)動H橋時有關(guān)波形如圖2-2所示:
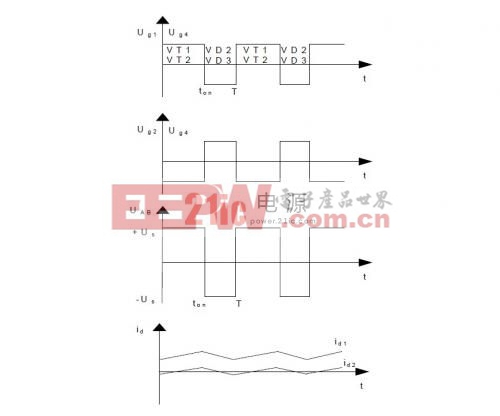
4組驅(qū)動電壓關(guān)系為:Ug1=Ug4=-Ug2=-Ug3,在一個開關(guān)周期T內(nèi),當(dāng)0≤t
在電流波形中,id1相當(dāng)于一般負(fù)載的情況,脈動電流的方向始終為正;id2相當(dāng)于輕載情況,電流可在正負(fù)方向之間脈動,但平均值為正,等于負(fù)載電流。
當(dāng)ton>
,時,UAB的平均值為正,電機(jī)正轉(zhuǎn),反之則反轉(zhuǎn);如果正負(fù)脈沖寬度相等,則平均電壓為0,電機(jī)停止。

陀螺儀相關(guān)文章:陀螺儀原理











評論