直流電機優化控制系統設計(二)


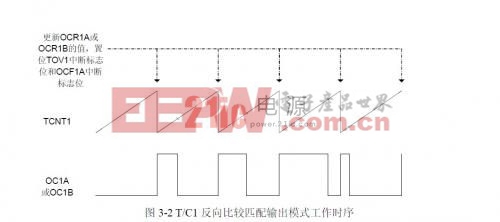
fCLK_IO 為時鐘頻率,為8MHz,取N=1,即不對時鐘進行分頻,TOP 值代表CNT1 計數的最大值,跟PWM 位數有關,當選擇8 位快速PWM 模式時,TOP=255,則輸出頻率為31.25KHz;選擇9 位快速PWM時,TOP=511,則輸出頻率為15.6KHz,綜合比較,選擇9 位快速PWM 輸出模式,能同時滿足頻率和精度的要求。頻率確定后,還需確定占空比(波形)。引腳OC1A 或OC1B 的輸出波形取決于觸發器OC1A 或OC1B。在T/C1 設置成反向比較匹配輸出模式下時,若TCNT1 中計數值和OCR1A 或OCR1B 中比較值匹配相等時,OC1A 或OC1B 觸發器被清零,OC1A 或OC1B 引腳輸出低電平;若TCNT1 中計數值繼續計數到TOP 值并由此而返回0000H,則OC1A 或OC1B 被置位,OC1A 或OC1B 輸出高電平。工作時序如圖3-2 所示。當TCNT1 中的計數值達由TOP 值變為0000H 時,T/C1 產生溢出中斷,置位中斷標志位TOV1,若中斷是開放的,則MCU 會立即轉入相應中斷服務程序。TOV1 也由硬件自動清零,向該標志位寫”1”則由軟件清除該標志位。在中斷服務程序中改變OCR1A 的值,則其PWM 波形占空比會發生相應變化 。圖3-2 T/C1 反向比較匹配輸出模式工作時序本系統中,我們只需要一路PWM 信號即可,這里用OC1A 引腳產生,采用9 位快速PWM 模式,頻率為15.6KHz,當要改變輸出占空比時,改變OCR1A的值即可。
3.2.2 驅動信號形成及死區發生
H橋要由4 路其中兩路反向的波形來驅動,因此需將PWM 波形進行反向處理。此外,還需加入防止H 橋上下臂直通的延時電路。如圖3-3 所示。
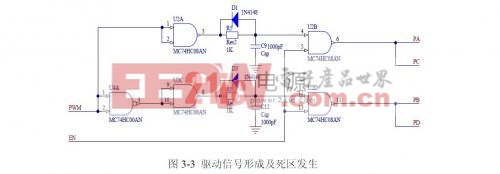
EN 為PWM 輸出使能信號,當EN 為低電平時,封鎖輸出與門,輸出全為低電平,電機停轉。同時輸出與門也起著整形的作用。PWM 信號一路直接輸入與門,另一路經反向后送入與門,增加其驅動能力。D1、R5、C9,D3、R9、C12構成死區發生,利用阻容充電,使波形緩慢上升,再利于與門的閾值電壓(VCC/2,這里為2.5V)對波形進行整形。下降沿時,電容通過二極管進行快速放電,這樣就行成了導通延時。各點波形如圖3-4 所示。更新OCR1A或OCR1B的值,置位TOV1中斷標志標志位TCNT1OC1A或OC1B死區時間為△t,對MOSFET,死區時間可取0.2-1μs。本文將R5 和R9 用可變電阻代替,將死區時間設為500ns。
經過該電路處理后,一路PWM 信號變成4 路PWM 信號,其中PA、PC 同相,PB、PD 也同相,這兩組信號互為反相且存在死區。
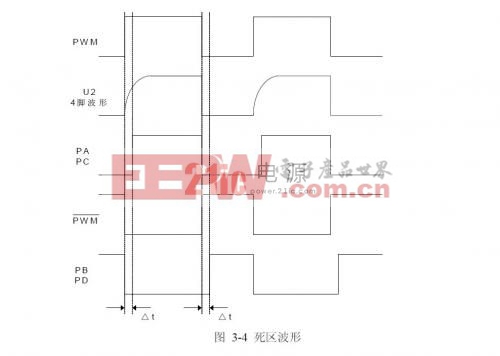
圖 3-4 死區波形

陀螺儀相關文章:陀螺儀原理











評論