基于分布式電源并網逆變器控制策略與仿真研究

(3)當光照強度發生變化(由于在短時間內,環境溫度的變化對系統輸出功率的變化影響不大,可以忽略),即輸出電壓Umax時的輸出功率P1與之前的Pmax之間差值超過一定閾值△P時,若P1>Pmax,說明光照強度增加了,MPP處的輸出電壓也相應增大了,所以此時應啟動按增加光伏電池陣列輸出電壓的方向用過山車法尋找MPP程序。
2 分布式電源并網逆變器仿真
2.1 DC-DC直流升壓PID控制仿真
作為直流母線400 V電壓必須具有一定的穩定性,不應該隨著負載的變化或電池電壓的改變而產生波動。因此必然需要用到反饋的概念。反饋理論的要素包括三個部分:測量、比較和執行。測量關心的變量,與期望值相比較,用這個誤差糾正調節控制系統的響應。
針對DC-DC直流母線硬件結構以及控制方式對被控模型進行數學建模,由于PWM裝置的數學模型與晶閘管裝置一樣,在控制系統中的作用也一樣。因此,當開關頻率為10kHz時,T=0.1 ms,在一般電力自動控制系統中,時間常數這么小的滯后環節可以近似一個一階慣性環節,故其傳遞函數為:Ws(s)≈Ks/(TS+1) (5)
這與晶閘管的傳遞函數完全一致。但需要注意,式(5)是近似的傳遞函數,實際上PWM變換器不是一個線性環節,而是具有繼電特性的非線性環節。繼電控制系統在一定條件下會產生自激振蕩,這是采用線性控制理論的傳遞函數不能分析出來的。根據式(5)結合本設計開關頻率10 kHz可以建立被控對象數學模型為:Ws(s)≈(400/9)/(1e-4+1) (6)
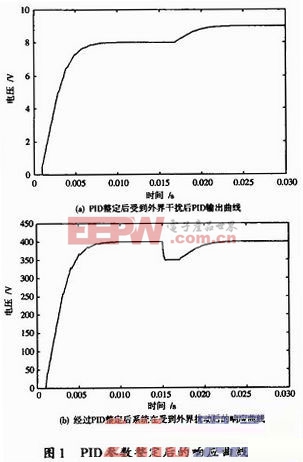
如圖1(a)為進一步進行PID參數整定后的PID輸出電壓響應曲線,可以看出即使在外界認為施加干擾的情況下PID調節器輸出電壓還保持在許可范圍內。圖1(b)所示為進一步進行PID參數整定后直流母線電壓響應曲線。可以看到即便在外界認為施加干擾的情況下直流母線電壓仍可自動穩定在400V的要求電壓。這能為后續的SPWM逆變并網提供穩定的直流母線電壓;而由于硬件電路限制,由于PID控制一推挽電路,而該推挽電路僅可提供0~12V的調節,考慮這一點所設計出來的PID調節器輸出在0~12V范圍之內。 2.2 逆變并網器并網仿真
逆變并網是將逆變器所產生的正弦電壓,在同頻同相同幅的情況下進行并網。并通過鎖相環調節并網電壓以及電流,使它們達到同相,改善電能質量,從而提高傳統電網穩定性。針對這一點,本設計建立元件級Simulink仿真。能有效減少失誤率,提高并網可靠性,因此建立該仿真模型是很有必要的。模型中設計了相應的PID調節器,并對MPPT算法進行編寫相應S函數。
太陽能電池的伏安特性如圖2(a)所示,它表明在某一確定的日照強度和溫度下,太陽能電池的輸出電壓和輸出電流之間的關系,簡稱V-I特性。從V-I特性可以看出,太陽能電池的輸出電流在大部分工作電壓范圍內近似恒定,在接近開路電壓時,電流下降率很大。
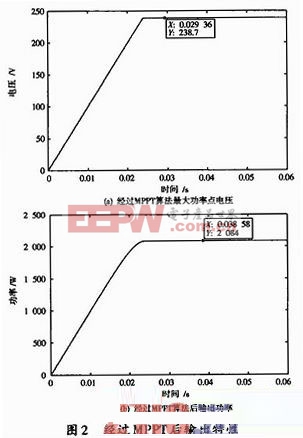
由圖2(a)可知,該伏安特性曲線具有強烈的非線性。太陽能電池的額定功率是在以下條件下定義的:當日射S=1 000 W/m2,太陽能電池溫度T=25℃時,太陽能電池輸出的最大功率便定義為他的額定功率。太陽能電池額定功率的單位是“峰瓦”,記以“Wp”.相應日射強度下太陽能電池輸出最大功率的位置,稱為“最大功率點”.根據Matlab提供的太陽能電池板模型的輸出特性曲線可知當前條件下,最大功率點為241.8V時輸出2083W.經過MPPT算法后,太陽能輸出電壓自動跟蹤輸出時最大功率點時的對應電壓,而其亦以最大功率穩定輸出。即輸出為238.7V時,功率為2084W.對比之前實際太陽能電池板最大功率點數據,最大功率點為241.8V時輸出2083W.可以看出該算法基本能跟蹤太陽能電池板的最大功率點。
3 結論
本文針對分布式電源并網過程中的直流升壓、同步鎖相、逆變并網動態過程,研究了基于電網特點的FIR數字濾波、交流采樣和穩定直流母線電壓的數字PID控制器等技術,提出了相應的控制策略并進行Simulink動態仿真,研究工作對分布式電源并網逆變系統設計理論上具有一定指導作用。

逆變器相關文章:逆變器原理
pid控制相關文章:pid控制原理
dc相關文章:dc是什么
逆變器相關文章:逆變器工作原理
比較器相關文章:比較器工作原理
pid控制器相關文章:pid控制器原理
鎖相環相關文章:鎖相環原理

評論