分布式電源并網(wǎng)逆變器控制策略與仿真研究
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
摘要:逆變技術(shù)的發(fā)展是隨著電力電子技術(shù)、微電子技術(shù)和現(xiàn)代控制理論的發(fā)展而發(fā)展。針對(duì)光伏并網(wǎng)過(guò)程中的直流升壓、SPWM波形產(chǎn)生、同步鎖相、逆變并網(wǎng)動(dòng)態(tài)過(guò)程、研究了基于電網(wǎng)特點(diǎn)的FIR數(shù)字濾波、交流采樣和穩(wěn)定直流母線(xiàn)電壓的數(shù)字PID控制器等技術(shù)提出了基于改進(jìn)MPPT算法的控制策略并進(jìn)行Simulink動(dòng)態(tài)仿真。
關(guān)鍵詞:分布式電源;并網(wǎng)逆變器;FIR數(shù)字濾波;數(shù)字PID控制;控制策略
分布式電源憑借其就地發(fā)電服務(wù)用戶(hù)、清潔環(huán)保等諸多優(yōu)點(diǎn),擁有越來(lái)越大的市場(chǎng)份額。微電子技術(shù)的發(fā)展為逆變技術(shù)的實(shí)用化創(chuàng)造了平臺(tái),微處理器的誕生滿(mǎn)足了逆變技術(shù)的發(fā)展要求,使先進(jìn)的控制技術(shù)如矢量控制技術(shù)、多電平變換技術(shù)、重復(fù)控制、模糊邏輯控制等先
進(jìn)的控制算法在逆變領(lǐng)域得到了較好的應(yīng)用。進(jìn)入21世紀(jì),逆變技術(shù)正向著頻率更高、功率更大、效率更高、體積更小的方向發(fā)展。本設(shè)計(jì)方案采用DC-DC-AC結(jié)構(gòu)能有效提高效率,采用高頻直流升壓技術(shù)使逆變并網(wǎng)器體積更小,安全性能大大提高。針對(duì)動(dòng)態(tài)系統(tǒng)的試驗(yàn)問(wèn)題提出了利用Simulink的參數(shù)估計(jì)功能,使理論模型根據(jù)實(shí)驗(yàn)數(shù)據(jù)進(jìn)行數(shù)值參數(shù)估計(jì),從而達(dá)到理論模型充分接近實(shí)際實(shí)驗(yàn)環(huán)境。
1 分布式電源并網(wǎng)逆變器系統(tǒng)設(shè)計(jì)
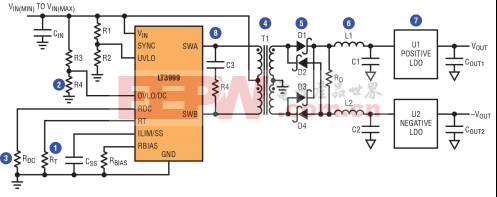
1.1 DC-DC變換器
DC-DC變換器是通過(guò)半導(dǎo)體閥器件的開(kāi)關(guān)動(dòng)作將直流電壓先變?yōu)榻涣麟妷海?jīng)整流后又變?yōu)闃O性和電壓值不同的直流電壓的電路,這里要闡述的是中間經(jīng)過(guò)變壓器耦合的直流間接變換電路。DC-DC變換器在將直流電壓變換為交流電壓時(shí)頻率是任意可選的,因此使用高頻變壓器能使變壓器和電感等磁性元件和平波用電容器小型輕量化。如今,隨著半導(dǎo)體閥器件的進(jìn)步,輸出功率為100 W以上的電源實(shí)際上采用的開(kāi)關(guān)頻率都在20~500 kHz范圍內(nèi),MHz級(jí)高頻變換器也在開(kāi)發(fā)研究之中。而且,通過(guò)變換頻率的高頻化,可以使平波用電容的容量減小,從而能夠使用陶瓷電容等高可靠性的元件。而且,本文在舉例闡述動(dòng)作原理是采用雙極功率晶體管、IGBT、MOSFET等開(kāi)通關(guān)斷可控的器件作為直流電壓變換為交流電壓的半導(dǎo)體閥器件,使用最多的還是MOSFET。
1.2 直流母線(xiàn)電壓PID控制器設(shè)計(jì)
作為直流母線(xiàn)400 V電壓必須具有一定的穩(wěn)定性,不應(yīng)該隨著負(fù)載的變化或電池電壓的改變而產(chǎn)生波動(dòng)。因此必然需要用到反饋的概念。反饋理論的要素包括三個(gè)部分:測(cè)量、比較和執(zhí)行。測(cè)量關(guān)心的變量,與期望值相比較,用這個(gè)誤差糾正調(diào)節(jié)控制系統(tǒng)的響應(yīng)。由于PID控制器可以實(shí)現(xiàn)無(wú)差調(diào)節(jié),其優(yōu)異的動(dòng)態(tài)穩(wěn)態(tài)特性,以及方便靈活的參數(shù)整定方法,因此在逆變并網(wǎng)器中直流母線(xiàn)的電壓控制選擇PID控制算法。
在閉環(huán)控制系統(tǒng)里,將調(diào)節(jié)器置于純比例作用下,從小到大逐漸改變調(diào)節(jié)器的比例系數(shù),得到等幅振蕩的過(guò)渡過(guò)程。此時(shí)的比例系數(shù)稱(chēng)為臨界比例系數(shù)Ku,相鄰兩個(gè)波峰間的時(shí)間間隔,稱(chēng)為臨界振蕩周期Tu。
臨界比例度法步驟:
(1)將調(diào)節(jié)器的積分時(shí)間置于最大(TI=∞),微分時(shí)間置零(TD=0),比例系數(shù)KP適當(dāng),平衡操作一段時(shí)間,把系統(tǒng)投入自動(dòng)運(yùn)行。
(2)將比例系數(shù)KP逐漸增大,得到等幅振蕩過(guò)程,記下臨界比例系數(shù)Ku和臨界振蕩周期Tu值。
(3)根據(jù)Ku和Tu值,采用經(jīng)驗(yàn)公式,計(jì)算出調(diào)節(jié)器各個(gè)參數(shù),即KP,TI和TD的值。
1.3 逆變并網(wǎng)鎖相環(huán)設(shè)計(jì)
鎖相環(huán)分為模擬鎖相環(huán)和數(shù)字環(huán)鎖相。模擬鎖相環(huán)在電路可靠性、穩(wěn)定性和集成度方面有著不可克服的缺陷:數(shù)字鎖相環(huán)又分為由數(shù)字邏輯器件構(gòu)成的全數(shù)字邏輯鎖相環(huán)和基于DSP的軟件鎖相環(huán)。全數(shù)字邏輯鎖相環(huán)路由邏輯器件構(gòu)成。
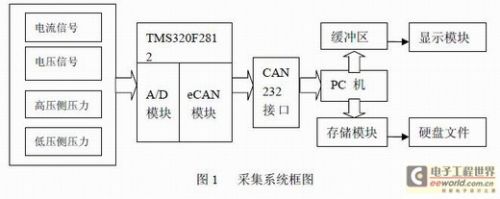
為了實(shí)現(xiàn)對(duì)電網(wǎng)電壓(SIGNAL)周期和相位的采樣,這里利用了一個(gè)遲滯比較器把信號(hào)源的模擬采樣信號(hào)(SIGNAL)整形為矩形波(TO_DSP)然后通過(guò)TMS320F28X的捕獲單元得到電網(wǎng)電壓的頻率和相位信息。在設(shè)計(jì)中應(yīng)當(dāng)注意的是,由于軟件是通過(guò)電網(wǎng)電壓的上升沿來(lái)獲得周期和相位信息的,因此在硬件的設(shè)計(jì)上應(yīng)當(dāng)保證電網(wǎng)電壓的過(guò)零點(diǎn)和正弦波整形得到的矩形波的上升沿保持一致(即不能有延時(shí)),這就要求計(jì)算遲滯比較器的上限觸發(fā)電平U+為0 V。
遲滯比較器的上、下限觸發(fā)電平為:
式中:U+,U-為遲滯比較器的上、下限觸發(fā)電平;UOH,OL為輸出電壓的上下限(UOH為5 V,UOL為0 V);UR為比較器的基準(zhǔn)電壓,這里為0 V。
交流有效值定義為:
![]()
式中:x(t)為被測(cè)交流信號(hào);Xeff為對(duì)應(yīng)的有效值;t是時(shí)間;T是交流信號(hào)的周期。式(3)給出的有效值包含了基波和諧波的共同貢獻(xiàn),通常稱(chēng)這種有效值為真有效值,有時(shí)也稱(chēng)為方均根值。
對(duì)于數(shù)字測(cè)量系統(tǒng),式(3)變成:
![]()
式中:xm(k)為交流信號(hào)在kTs時(shí)刻的采樣值(也稱(chēng)采樣數(shù)據(jù)),Ts為采樣周期,下標(biāo)m代表該采樣值采自交流信號(hào)的第m個(gè)周波,k代表在第m個(gè)周波內(nèi)的第k次采樣(k=1,2,…,N);N是在交流信號(hào)一個(gè)周期內(nèi)的采樣次數(shù)或采樣點(diǎn)數(shù)。
1.4 改進(jìn)MPPT算法
傳統(tǒng)MPPT算法,即爬山法,是一種比較實(shí)用的MPPT控制算法,這種方式雖在一定程度上減輕了CPU的負(fù)擔(dān),但由于周期性尋優(yōu),會(huì)對(duì)系統(tǒng)的輸出電壓造成周期性的波動(dòng)。
改進(jìn)MPPT算法基本思想是:
(1)利用過(guò)山車(chē)法,即先將光伏電池陣列兩端電壓U1鉗制在蓄電池電壓U2處,再逐漸增加U1,使光伏電池陣列的輸出功率點(diǎn)由小到大,經(jīng)過(guò)MPP后,繼續(xù)增大U2,使輸出功率比最大輸出功率小于一個(gè)閾值△P1。輸出功率由小變大,再變小,一定會(huì)經(jīng)過(guò)一個(gè)最大點(diǎn)。在輸出功率變化過(guò)程中,記錄下光伏電池陣列輸出最大功率時(shí)的輸出電壓Umax;
(2)根據(jù)光伏電池陣列輸出最大功率時(shí)記錄下的Umax,利用穩(wěn)壓程序(可利用PID控制)將U1鉗制在記錄下的Umax上,實(shí)現(xiàn)光伏電池陣列以最大功率穩(wěn)定地輸出能量;
(3)當(dāng)光照強(qiáng)度發(fā)生變化(由于在短時(shí)間內(nèi),環(huán)境溫度的變化對(duì)系統(tǒng)輸出功率的變化影響不大,可以忽略),即輸出電壓Umax時(shí)的輸出功率P1與之前的Pmax之間差值超過(guò)一定閾值△P時(shí),若P1>Pmax,說(shuō)明光照強(qiáng)度增加了,MPP處的輸出電壓也相應(yīng)增大了,所以此時(shí)應(yīng)啟動(dòng)按增加光伏電池陣列輸出電壓的方向用過(guò)山車(chē)法尋找MPP程序;如果P1Pmax,說(shuō)明光照強(qiáng)度減小了,MPP處的輸出電壓也相應(yīng)減小,故此時(shí)應(yīng)啟動(dòng)按減小光伏電池陣列輸出電壓的方向用過(guò)山車(chē)法尋找MPP程序。
2 分布式電源并網(wǎng)逆變器仿真
2.1 DC-DC直流升壓PID控制仿真
作為直流母線(xiàn)400 V電壓必須具有一定的穩(wěn)定性,不應(yīng)該隨著負(fù)載的變化或電池電壓的改變而產(chǎn)生波動(dòng)。因此必然需要用到反饋的概念。反饋理論的要素包括三個(gè)部分:測(cè)量、比較和執(zhí)行。測(cè)量關(guān)心的變量,與期望值相比較,用這個(gè)誤差糾正調(diào)節(jié)控制系統(tǒng)的響應(yīng)。
針對(duì)DC—DC直流母線(xiàn)硬件結(jié)構(gòu)以及控制方式對(duì)被控模型進(jìn)行數(shù)學(xué)建模,由于PWM裝置的數(shù)學(xué)模型與晶閘管裝置一樣,在控制系統(tǒng)中的作用也一樣。因此,當(dāng)開(kāi)關(guān)頻率為10 kHz時(shí),T=0.1 ms,在一般電力自動(dòng)控制系統(tǒng)中,時(shí)間常數(shù)這么小的滯后環(huán)節(jié)可以近似一個(gè)一階慣性環(huán)節(jié),故其傳遞函數(shù)為:
Ws(s)≈Ks/(TS+1) (5)
這與晶閘管的傳遞函數(shù)完全一致。但需要注意,式(5)是近似的傳遞函數(shù),實(shí)際上PWM變換器不是一個(gè)線(xiàn)性環(huán)節(jié),而是具有繼電特性的非線(xiàn)性環(huán)節(jié)。繼電控制系統(tǒng)在一定條件下會(huì)產(chǎn)生自激振蕩,這是采用線(xiàn)性控制理論的傳遞函數(shù)不能分析出來(lái)的。根據(jù)式(5)結(jié)合本設(shè)計(jì)開(kāi)關(guān)頻率10 kHz可以建立被控對(duì)象數(shù)學(xué)模型為:
Ws(s)≈(400/9)/(1e-4+1) (6)

比較器相關(guān)文章:比較器工作原理
pid控制器相關(guān)文章:pid控制器原理
光伏發(fā)電相關(guān)文章:光伏發(fā)電原理 矢量控制相關(guān)文章:矢量控制原理 鎖相環(huán)相關(guān)文章:鎖相環(huán)原理

評(píng)論