交互式應(yīng)用一舉兩得 實(shí)時(shí)仿真與嵌入式系統(tǒng)并構(gòu)

17725為TCP默認(rèn)端口號(hào)(可以設(shè)置在256~65535之間)。
運(yùn)行后我們可以看到目標(biāo)機(jī)上的屏幕上顯示:
waiting for start message from host(5) 建立連接
在External Target Interface對(duì)話框中的MEX-file arguments指定目標(biāo)機(jī)的IP、冗長(zhǎng)度和TCP端口號(hào),如圖6所示,就可以建立連接了。

圖6 External Target Interface對(duì)話框設(shè)置
打開External Mode Control Panel,如圖7所示。點(diǎn)擊Connect按鈕,執(zhí)行Start real-time code,可以看到Scope上的圖形輸出。此時(shí),可以改變模型的參數(shù)(如增益的數(shù)值),參數(shù)下載后Scope的曲線將隨之改變。仿真時(shí)間結(jié)束以后,可以看到產(chǎn)生了一個(gè)external.mat文件,由目標(biāo)機(jī)會(huì)傳到主機(jī),放在Tornado的安裝根目錄下。
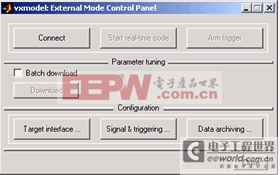
圖7 External Mode Control Panel對(duì)話框
4、結(jié)論
針對(duì)Matlab的仿真特性和VxWorks操作系統(tǒng)的實(shí)時(shí)特點(diǎn),本文介紹了RTW面向Tornado(VxWorks)實(shí)時(shí)目標(biāo)的運(yùn)行結(jié)構(gòu),并且較為詳細(xì)的闡述了Tornado(VxWorks)實(shí)時(shí)目標(biāo)的具體實(shí)現(xiàn)流程,實(shí)現(xiàn)了Simulink在Tornado(VxWorks)實(shí)時(shí)目標(biāo)下的仿真。在結(jié)合相關(guān)文檔的同時(shí),加入親身實(shí)驗(yàn)的經(jīng)驗(yàn),增補(bǔ)了一些必要的內(nèi)容,完善了實(shí)驗(yàn)的具體步驟,降低了今后實(shí)驗(yàn)的調(diào)試難度。






評(píng)論