基于DSP與FPGA的跟蹤伺服運(yùn)動(dòng)控制器設(shè)計(jì)

2.4 其他模塊
其他模塊主要包括電源模塊和通信接口模塊。由于該控制器采用單+5 V供電,因此在內(nèi)部需要進(jìn)行電壓轉(zhuǎn)換,主要包括3.3 V、1.9 V和1.2 V以及-5 V和±12 V。其中3.3 V、1.9 V和1.2 V采用的是一般的LDO電壓轉(zhuǎn)換芯片,而-5 V和±12 V則采用開關(guān)電源MC34063。由于DSP要求3.3 V上電在1.9 V之前,在這里選用通過3.3 V轉(zhuǎn)1.9 V的方法,既保證了上電順序,又能提高電源的轉(zhuǎn)換效率。
通信接口模塊包括1路CAN總線,1路RS232和2路RS422。設(shè)計(jì)時(shí)主要保證與系統(tǒng)的其他部分匹配,一般都采用通常的工業(yè)標(biāo)準(zhǔn)。
3 軟件流程
為了提高控制的精度和響應(yīng)速度,在硬件電路基礎(chǔ)上增加位置環(huán)和速度環(huán)。其中位置和位置增量數(shù)據(jù)通過RS422從外部編碼器傳入,速度值數(shù)據(jù)通過由QEP電路產(chǎn)生。此外豐富的模擬信號(hào)輸入通道還可以增加電流環(huán)和其他反饋量,進(jìn)一步提高系統(tǒng)的響應(yīng)速度和穩(wěn)定性。基本軟件流程圖如圖4所示。
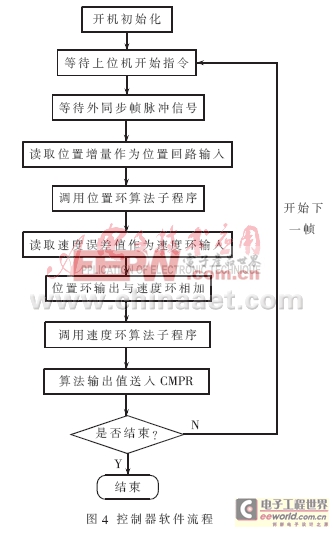
系統(tǒng)上電后自動(dòng)初始化各端口和相關(guān)變量,并等待接收上位機(jī)開始指令,接收到開始指令后進(jìn)入準(zhǔn)備狀態(tài)。因?yàn)檎麄€(gè)跟蹤系統(tǒng)需要同步工作才能產(chǎn)生有效的數(shù)據(jù),所以需要等待外部同步脈沖信號(hào),在這里以外部中斷的形式接收。然后逐步完成控制算法。當(dāng)收到結(jié)束指令時(shí)完成所有工作。
本文給出了一種基于DSP和FPGA的光電跟蹤系統(tǒng)伺服控制器的硬件結(jié)構(gòu)和軟件流程。實(shí)驗(yàn)證明,這種結(jié)構(gòu)緊湊靈活,控制算法完全由控制器完成,使用CAN總線方式傳輸上位機(jī)指令,安全可靠,使計(jì)算機(jī)完全從工作現(xiàn)場(chǎng)解脫出來。

pid控制器相關(guān)文章:pid控制器原理












評(píng)論