一種基于PLC的智能鉗型吊電氣控制系統(tǒng)

3、PLC的選型
PLC在性能上比繼電控制邏輯優(yōu)異,PLC可靠性高,抗干擾能力強(qiáng),在硬件和軟件兩個(gè)方面還采用可屏蔽、濾波、隔離、故障診斷和自動(dòng)恢復(fù)等措施,其平均無故障時(shí)間達(dá)到(3~5) ×104 h 以上;PLC編程直觀、簡單,采用了一種面向控制過程的梯形圖語言;PLC適應(yīng)性好,它是通過程序?qū)崿F(xiàn)控制的。
在本設(shè)計(jì)方案中,采用三菱微型可編程控制器—FX2N-128MR。
二、控制方法
由于鉗型吊的工作部件比較復(fù)雜,包括主鉤、副鉤、大車、小車、夾鉗回轉(zhuǎn)及開閉等,對(duì)這些電機(jī)都要求有4級(jí)速度變換和正反向切換。現(xiàn)在以主鉤系統(tǒng)為例,說明實(shí)現(xiàn)上述要求的控制方法。
圖1是直流調(diào)速裝置Mentor II的速度給定選擇圖,圖1中,01.17 為速度給定1; 01.18 為速度給定2; 01.19 為速度給定3;01.20為 速度給定4(4個(gè)給定速度在Mentor II菜單上設(shè)定);01.12為正反向選擇。
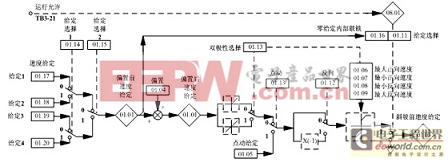
圖1:Mentor II的速度給定選擇圖
我們用PLC的輸出控制,如圖2所示
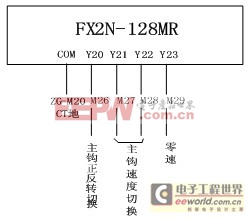
圖2:PLC的輸出控制
在圖2中, Y20為正反向切換,Y21、Y22為速度切換,其速度表如表1:
表1 主鉤速度表

圖2中的M26、M27、M28分別對(duì)應(yīng)直流調(diào)速裝置MENTOR II的TB3-26、TB3-27、TB3-28接線端,而TB3-26、TB3-27、TB3-28分別對(duì)應(yīng)數(shù)字量輸入端 08.16;08.17;08.18,我們只要令08.16=01.12;08.17=01.14;08.18=01.15,就可以實(shí)現(xiàn)用PLC的輸出來控制電機(jī)的正反向和速度切換。
另外,當(dāng)主鉤控制器故障或主電源斷電時(shí),由司機(jī)室啟動(dòng)緊急提升開關(guān),緊急提升裝置將主鉤提起,緊急提升裝置由輔助滑電道供電。







評(píng)論