一種基于FPGA的太陽跟蹤器的設(shè)計(jì)及實(shí)現(xiàn)

3.3 太陽高度角方位角計(jì)算模塊
當(dāng)時間為正常光照時間時,太陽跟蹤系統(tǒng)每隔5 min就會進(jìn)入太陽高度角方位角進(jìn)行計(jì)算。計(jì)時模塊輸出給太陽高度角方位角模塊所需的時間信息,然后計(jì)算赤道坐標(biāo)系下的赤緯角和時角,最后計(jì)算高度角方位角坐標(biāo)系下的高度角和方位角值,并輸出高度角和方位角值如圖6所示,仿真波形如圖7所示。高度角和方位角輸出均為10 b Q7格式。
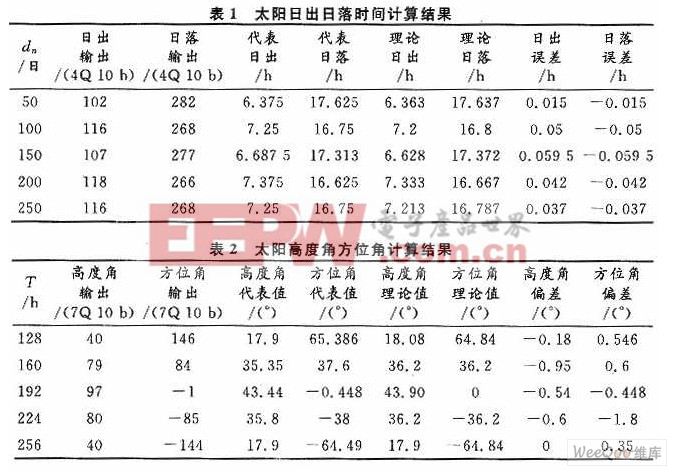
在視日運(yùn)動跟蹤算法中最重要的是準(zhǔn)確計(jì)算出當(dāng)前的太陽相對于地球的高度角和方位角,其計(jì)算準(zhǔn)確性影響太陽能裝置的能量接受效率。表2表示在dn=100時,不同的時間輸出的太陽的高度角及方位角值,都為10 b Q7格式,計(jì)算其實(shí)際代表值,并與理論值相比較,誤差很小,說明該模塊能夠準(zhǔn)確計(jì)算出太陽的高度角和方位角。
3.4 步進(jìn)電機(jī)脈沖控制模塊
步進(jìn)電機(jī)驅(qū)動芯片選擇了3955SB,本設(shè)計(jì)選擇步進(jìn)電機(jī)的1/8步運(yùn)行模式,即每步可以達(dá)到0.225°。由太陽的高度角方位角計(jì)算模塊輸出的高度角和方位角及上一次輸出的高度角方位角值,決定高度和方位需要轉(zhuǎn)動的角度,然后確定高度角步進(jìn)電機(jī)和方位角步進(jìn)電機(jī)的脈沖個數(shù)。根據(jù)步進(jìn)電機(jī)的步進(jìn)順序輸出16位數(shù)字信號來控制實(shí)現(xiàn)兩臺兩相步進(jìn)電機(jī)高度和方位上旋轉(zhuǎn)的角度及其旋轉(zhuǎn)方向。由實(shí)驗(yàn)結(jié)果可知,該模塊能夠按照輸入的電機(jī)轉(zhuǎn)動的脈沖個數(shù)進(jìn)行輸出,并在電機(jī)完成旋轉(zhuǎn)要求后能夠保持穩(wěn)定狀態(tài)。當(dāng)有新的轉(zhuǎn)動輸入后能夠在原來的狀態(tài)上輸出。
4 結(jié)語
本文設(shè)計(jì)的太陽跟蹤系統(tǒng)適用于太陽能熱水器、太陽能灶、太陽能電池等需要跟蹤太陽地裝置。跟蹤控制系統(tǒng)采用了視日運(yùn)動跟蹤方法,通過基于FPGA的高度角方位角計(jì)算模塊準(zhǔn)確計(jì)算出太陽的高度角和方位角。利用轉(zhuǎn)動精確的步進(jìn)電機(jī)驅(qū)動,可以精確地跟蹤太陽,有效提高太陽跟蹤裝置的太陽能吸收效率。













評論