一種基于FPGA的太陽跟蹤器的設(shè)計及實現(xiàn)

2 太陽跟蹤控制系統(tǒng)設(shè)計
根據(jù)上文介紹的高度角-方位角跟蹤系統(tǒng)的整體框架,本文基于Xilinx公司的FPGA開發(fā)板,設(shè)計了基于FPGA的太陽跟蹤系統(tǒng)的各功能模塊。主要包括計時模塊、太陽高度角方位角計算模塊、日出日落時間計算模塊和步進電機脈沖控制模塊等幾部分。
基于FPGA的太陽跟蹤控制系統(tǒng)的流程圖如圖2和圖3所示。
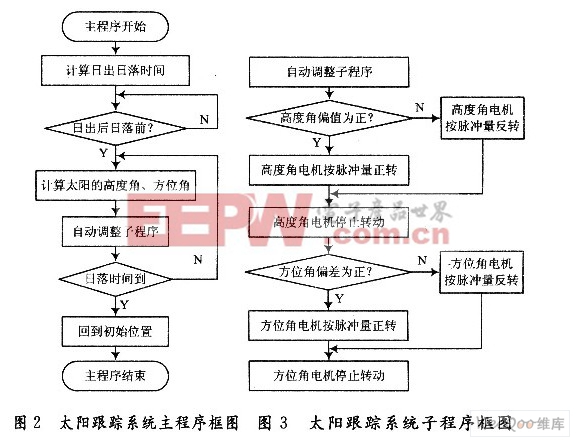
首先系統(tǒng)根據(jù)計時模塊計算出當前的時間,包括當日在一年中的日期序數(shù)dn(單位:日)及當前的時刻T(單位:h),然后再根據(jù)日出日落時間計算模塊確定當日的日出和日落時間,以便判斷當時時間是否在日出后日落前。在程序計算過程中,利用太陽高度角和方位角計算模塊計算當前太陽的位置,并與上次計算的太陽的位置作差,分別計算出當前跟蹤裝置高度和方位需要調(diào)整的角度及其旋轉(zhuǎn)方向,并隨后進入步進電機脈沖驅(qū)動模塊。首先調(diào)整高度角,判斷高度角差值的正負,驅(qū)動高度方向的步進電機旋轉(zhuǎn)。高度角步進電機停止旋轉(zhuǎn)后調(diào)整方位角。判斷方位角正負,驅(qū)動方位角步進電機按照偏差旋轉(zhuǎn)相應的角度。一次跟蹤后,在一定的時間間隔T后,系統(tǒng)再次提取時間計算、判斷、旋轉(zhuǎn)電機。當日落時間到時,控制步進電機旋轉(zhuǎn)至次日太陽升起的位置并恢復初始狀態(tài)。由此本系統(tǒng)就實現(xiàn)了對太陽的全天候、實時跟蹤。













評論