基于單片機的數字通信系統位同步提取

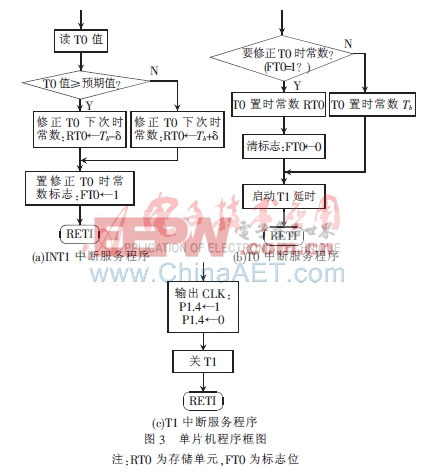
該數字鎖相環未用DLF。單片機內T0定時器及其中斷服務程序實現DCO功能。在DK1無跳變沿(無ZCD負脈沖)時,單片機不進入INT1中斷服務程序,T0定時為輸入碼周期Tb。在DK1有跳變沿時,進入INT1中斷服務程序,首先讀取T0當前值與預期值(Tb/2時常數),通過比較確定DCO相位與DK1數據跳變沿相位關系是超前或滯后,據此調整DCO相位。若DCO相位超前,則設置T0下周定時為Tb+δ,使DCO相位推遲;若DCO相位滯后,則設置T0下周定時為Tb-δ,使DCO相位提前,最后實現DCO相位與DK1數據相位鎖定。總之,INT1中斷服務程序實現DPD及DCO控制功能,T0定時器及其中斷服務程序實現DCO功能。T1定時器及其中斷服務程序實現延時即相移,使最后輸出的位同步時鐘CLK與DK1(或DK2)的相位差為0或180°:當傳輸系統頻帶不受限、采用MSK/FSK調制解調方式時,DK1為方波,接收端采用積分/采樣/判決進行檢測,兩者相位差應為0,即CLK與DK1數據邊沿對齊;當傳輸系統頻帶受限、采用GMSK/GFSK調制解調方式時,DK2(DK1經LPF后的信號)為鐘形脈沖,CLK應對準DK2碼元中點采樣/判決,兩者相位差為180°或Tb/2,如圖2(d)所示。T1延時由P1.4輸入信號MSKC控制。INT1、T0及T1中斷服務程序框圖如圖3所示,主程序完成3個中斷源初化及其他初始化后就踏步。
位同步提取數字鎖相環由CPU2實現,其P1.4輸入的控制信號MSKC來自CPU1,由工作方式決定:在FSK/MSK工作方式時,MSKC=1;在GMSK/GFSK工作方式時,MSKC=0。

數字通信相關文章:數字通信原理











評論