基于單片機的智能車控制系統設計

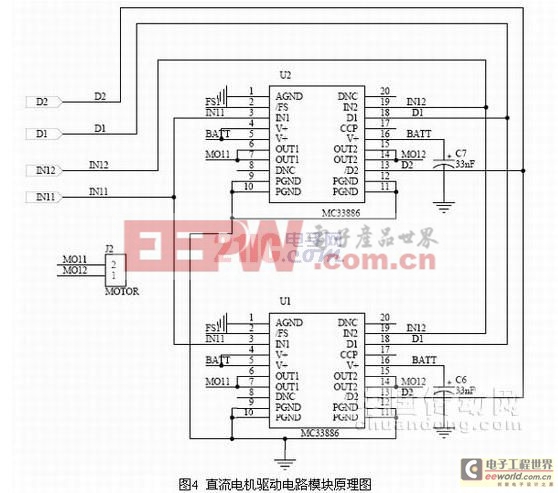
圖3為經過簡化的H橋電路,當S1、S4 導通且S2、 S3 截止時,電流正向流過直流電機,智能車前進;當S2、S3 導通且S1、S4 截止時,電流反向流過直流電機,適當利用這個過程可以使車模處于反接 制動的狀態,迅速降低車速;當S3、S4導通且S1、S2 截止時,沒有電源加在直流電機上,直流電機電樞兩端相當于短接在一起。由于電機軸在外力作用下 旋轉時,電機可以產生電能,此時可以把直流電動機看作一個帶了很重負載的發電機,電機上會產生一個阻礙輸出軸運動的力,這個力的大小與負荷的大小成正比, 此時電機處于能耗制動狀態。
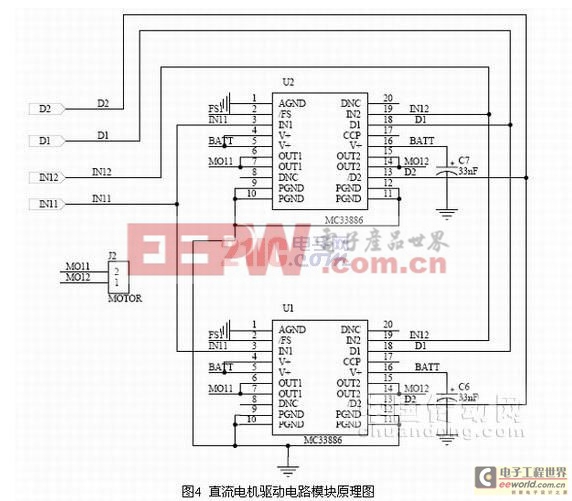
本設計方案中采用兩片MC33886并聯,一方面減小導通電阻對直流電機特性的影響,另一方面減小MC33886內部的過流保護電路對電機啟動及制動時的影響。直流電機驅動模塊電路原理圖如圖4所示。
(3)傳感器電路設計。智能車采用CMOS攝像頭作為圖像傳感器,保證賽道信息采集準確有效。CMOS攝像頭的輸出信號是PAL制式的復合全電視 信號,每秒輸出50幀(分為偶場和奇場)。當CMOS攝像頭采集圖像時,偶場和奇場不是同時采集的,因此,可以在每場信號都對路徑進行識別。

pid控制器相關文章:pid控制器原理

評論