基于單片機的智能車控制系統設計

1 引言
我國自2006年起舉辦的全國大學生“飛思卡爾杯”智能汽車競賽融科學性、趣味性和觀賞性為一體,是一項以迅猛發展、前 景廣闊的汽車電子為背景,涵蓋了自動控制、模式識別、傳感技術、電子、電氣、計算機、機械與汽車等多個學科專業的科技創新比賽。參賽隊伍在車模平臺基礎 上,制作一個能夠自主識別路線的智能車,在專門設計的賽道上自動識別道路行駛 [1]。
本文所述的智能車就是根據比賽規則要求設計并 制作而成的,該智能車控制系統采用飛思卡爾半導體公司生產的16位MC9S12DG128單片機作為數字控制器,由安裝在車前部的黑白CMOS攝像頭負責 采集賽道信息,并將采集到的信號經二值化處理后傳入單片機,單片機對信號進行判斷處理后,由PWM發生模塊發出PWM波對轉向舵機進行控制,完成智能車的 轉向。另外,智能車后輪上裝旋轉編碼器,用來采集車輪速度的脈沖信號,單片機使用PID控制算法處理后的控制量去改變電機驅動模塊的PWM波占空比,從而 控制智能車的行駛速度。
2 控制方案設計和硬件電路組成
設計有效的智能車控制系統必須首先掌握控制對象的特性。根據對智能車特點的分析,可以認為智能車轉向控制系統的傳遞函數近似為一階積分加純滯后,速度控制對象的傳遞函數近似為一階慣性加純滯后的結論。 轉向控制系統主要是要求響應速度快,對穩態控制精度要求不高。而且控制對象只有積分和滯后環節,沒有常見的慣性環節。根據以上特點,轉向控制采用PD控制器。
對速度進行檢測和控制的意義在于盡可能使智能車按照道路條件允許的最高速度行駛。
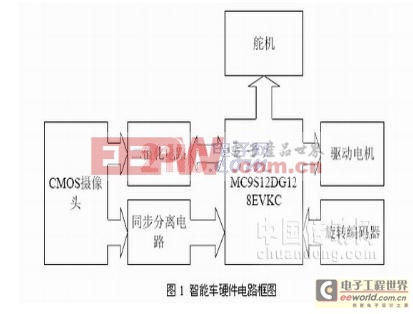
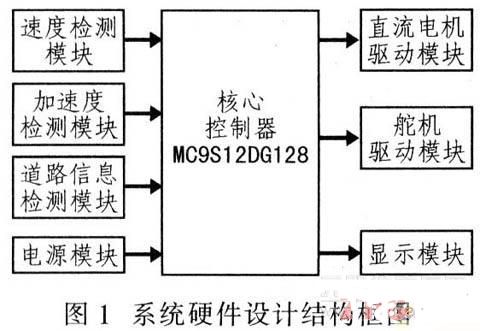
在 彎道應將車速限制為不脫軌的最高速度,在直道應當適當進行急加速以縮短單圈運行時間,提高比賽成績。同時,對速度信號進行積分求和可以得到賽道長度信息, 為道路識別與記憶模塊提供數據。智能車速度控制系統的精度不需要太高,關鍵是如何快速響應賽道的路況變化。因此速度控制采用PID控制器。針對不同的道路 狀況迅速準確地改變車速,實現穩定過彎。 智能車的硬件電路主要由視頻處理模塊、方向控制模塊和車速控制模塊組成。各模塊與單片機之間的關系如圖1所示。
3 模塊功能
(1)視頻處理模塊。視頻處理模塊由CMOS攝像頭、二值化電路和同步分離電路構成。
(2)轉向控制模塊。轉向控制模塊主要由舵機完成。舵機的轉動會轉化為車模轉向拉桿的橫向移動,從而帶動車模前輪的轉動,控制智能車的行駛方向。舵機的轉向控制采用PD控制,根據賽道中央黑線的位置,單片機向舵機輸出相應占空比的PWM信號。
(3) 車速控制模塊。車速控制模塊主要由直流電機、驅動電路和旋轉編碼器構成。根據CMOS攝像頭所檢測的路徑信息判斷智能車當前所處的賽道狀況,并根據旋轉編 碼器所檢測的實際車速形成對智能車行駛速度的閉環控制,合理地調整數字PID控制算法的Kp、Ki、Kd三個參數,達到車速響應迅速并消除靜態誤差的目的。

pid控制器相關文章:pid控制器原理

評論