基于細分驅動的船用儀表步進電機控制的實現

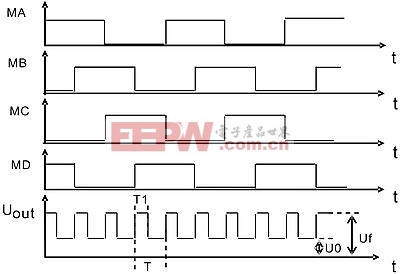
在本設計中勵磁繞組采用階梯型電壓驅動,在繞組上進行電流疊加,即每經過一個細分信號周期,單片機輸出到電機線圈的電壓順次發生變化,使得通過線圈的電流按上述公式產生接近正弦波的變化,逐漸增大或減少,而不是一次性地通入或切斷,使電機能更平穩地運行。
組合電阻式細分驅動是指步進電機每一相線圈一端與單片機的I/O口相連,另一端與N個阻值不同、處于并聯方式的電阻相連,N個電阻的數量和取值大小需要考慮電機內部線圈電阻,以便產生能夠驅動電機的、接近于正弦波的階梯波形。單片機與步進電機之間無專用驅動芯片。圖2所示為該24細分驅動法的硬件電路圖。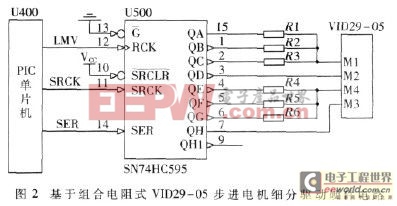
圖中M1、M2為步進電機的一相繞組,M3、M4為另一相繞組,SN74HC595是串行輸入并行輸出芯片,用作擴展PIC單片機的I/O口,每一相繞組上都接有3個并聯的電阻。因為VID29-05輸出軸的步距角最小可以達到(1/12)°,而它內置減速比為180/1的齒輪系,因此一個微步表示指針轉子轉動15°。VID29-05步進電機一個周期共有6個分步,即每個分步相位相差60°,每個分步可以細分為4個微步,整個周期細分為24個微步,即24細分,其對稱的階梯波形圖如圖3所示。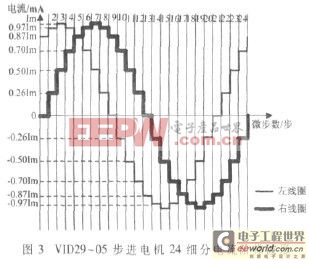
因為有12個不同的對稱階梯數值,故選取3個不同阻值的電阻與步進電機繞組線圈電阻一起就能得到16種邏輯組合,選取其中最合適的12種即可。在硬件電路中每一相都有3個電阻相并聯,VID29-05步進電機的每相內部繞組電阻為210 ?贅,單片機I/O口輸出電壓為5 V,再根據VID29-05步進電機微步驅動的各相電流值,可以計算出3個電阻與電機內部繞組在電路中的總等效電阻值和步進電機一相繞組上的電壓值,根據這些數據就可選配3個電阻的阻值和控制電阻引腳的電平邏輯。當QD輸出高電平時,QA、QB、QC有8種組合可選,除去輸出全高狀態,可根據需要取出其中最適合的6種狀態。當QD輸出低電平時,同理可取出除去全低狀態外的最適合的6種狀態,由此可得到12個值。
3 步進電機組合電阻式細分驅動的軟件設計
3.1 指示參數位置與步進電機微步數的關系
在本設計中,要顯示的參數有溫度、壓力、轉速和電壓。溫度顯示范圍為40 ℃~120 ℃,壓力顯示范圍為0~1 MPa,轉速顯示范圍為0~3 000 r/min,電壓顯示范圍為18 V~32 V。在此對溫度顯示與步進電機微步數的計算關系進行說明,其余三表類似。根據廠家給定的溫度面板滿量程刻度為112.5°,步進電機細分驅動中每一步旋轉角度(1/12)°,因此當達到滿量程時步進電機的微步數為step=112.5×12=1 350 步。但溫度是從40 ℃開始顯示的,應將40 ℃作為指示零點,且滿量程為120 ℃,滿量程點與初始點相差溫度為80 ℃,而它們之間的物理角度差為112.5°,因此溫度每相差一度,指針應走過的物理角度為(112.5/80)°,溫度與電壓近似成線性關系,如圖4所示的溫度-電壓關系圖,由此可得關系式: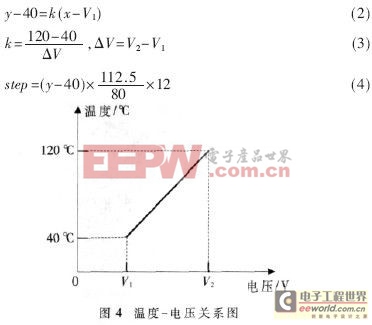
根據式(2)和式(3)就可計算出相對應的目標溫度值y,再根據式(4)就可計算出目標溫度相對應的儀表指針位置,即指針距初始點(“40 ℃”點)的微步數。將此位置與指針的當前位置進行比較,即可得到指針應轉動的方向和轉角。









評論