基于AT89C2051智能汽車防撞報警器設計

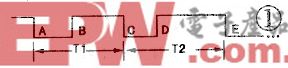
控制器AT89C2051主要完成程序的執行、數據的處理和對外部電路的實時控制。內部定時器T0工作在定時方式,T0在超聲波發射時開始計數,當P3.2引腳收到回波后,停止計數,T0所計時間即為超聲波往返傳輸時間,單片機對該數據進行處理,即可測出距離。內部定時器T1工作在計數方式,由P3.5引腳輸入的脈沖信號控制T1計數,由T1所計數值確定汽車的轉速。
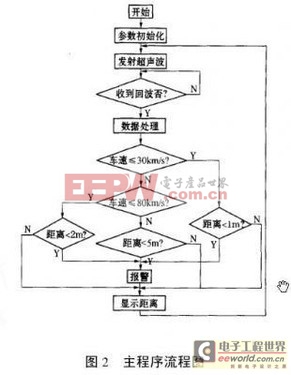
單片機根據所測距離和車速進行比較,判斷是否驅動報警電路報警,如設定:當車速小于等于30km/s時,安全距離應大于等于1m;當車速小于等于80km/s時,安全距離應大于等于2m;當車速大于80km/s時,安全距離應大于等于5m。
5 軟件設計
本裝置的控制軟件要完成系統的初始化,控制觸發脈沖信號的發射與接收,根據定時時間計算障礙物的距離,根據計數頻率計算汽車車速,判斷所測距離是否在車速所對應的安全范圍內,并根據計算和判斷結果產生BCD碼和相應頻率的脈沖信號,以驅動顯示電路和發聲電路。實現整個系統功能的主流程圖如圖2所示。
6 結束語
本文介紹的汽車報警器,利用單片機AT89C2051作為報警裝置的控制器,能充分發揮AT89C2051的數據處理和實時控制功能,使系統工作于最佳狀態,提高系統的靈敏度。該報警器基于單片機設計,從而具有體積小、使用方便的特點。若將安全距離設為0.5m,就可作為汽車倒車報警器,提高汽車倒車時的安全性。



評論