超聲波測距傳感器在高速公路自動發卡機中的應用

0 引言
高速公路運營單位為節省人力成本達到降本增效的目的,在收費站入口安裝自動發卡機代替人工發放通行卡的應用越來越廣泛。自動發卡機在使用過程中的一些缺點也逐漸顯現,比如,由于司機操作不當或發卡機安裝位置不當等原因,當車輛完全停下后距發卡機距離較遠,司機伸手無法順利取卡。為解決該問題,在自動發卡機上增加滑動平臺,利用超聲波測距功能檢測車輛離發卡機的距離,自動伸縮平移,縮短車輛與發卡機的距離,避免司機下車取卡,實現安全、方便、快捷取卡通行,節省取卡時間,增加通行效率。
作者簡介:黃濤(1983—),男,南昌人,工程師,主要研究方向為高速公路機電設備的研發。郵箱:120524324@qq.com。
1 超聲波測距傳感器原理
物體振動時都會發出聲響。在物理學上,頻率的定義為物體每一秒振動的次數,單位為赫茲。超聲波是高于兩萬赫茲的聲波[1]。超聲波測距傳感器包括超聲波發射器和超聲波接收器,通過發射器向某一方向發射一定頻率的超聲波(頻率一般大于20 kHz),在發射超聲波的同時開始計時,超聲波在空氣中傳播碰到障礙物立刻反射回來,超聲波接收器收到反射回來的超聲波后立即停止計時。超聲波測距傳感器就是利用超聲波在空氣中傳播,碰到障礙物往返時間,再乘以超聲波傳輸速度,即可求得距離障礙物的距離,原理示意圖如圖1 所示。

假定S 為被測障礙物到測距儀的距離,超聲波往返時間為 t,超聲波傳播速度為 v,則被測距離S = vt / 2。
2 系統設計
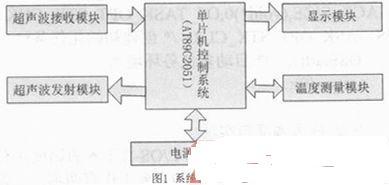
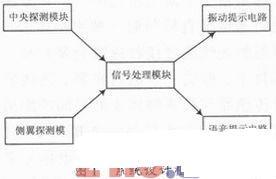
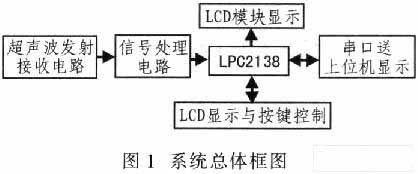
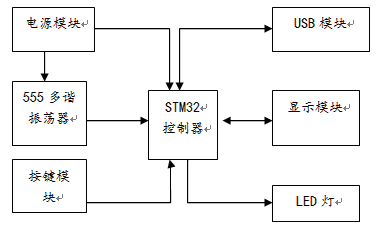
高速公路自動發卡機包括上工位和下工位發卡箱體,分別用于大型車輛和小型車輛發卡,主要硬件控制電路包括以STM32 單片機為主控制芯片的控制電路、上工位測距儀、上工位箱體移動電機及驅動電路、上工位箱體剎車機及驅動電路、下工位測距儀、下工位箱體移動電機及驅動電路、下工位箱體剎車機及驅動電路、車檢器和車型識別器,系統示意圖如圖2 所示。

當車輛進入收費車道時,車型識別器自動識別車輛類型,并將車型數據通過RS-485 串口發送至發卡機。隨后,車輛行駛至取卡位置,車檢器檢測到車輛,發卡機根據車輛類型判斷上工位還是下工位發卡,大型車輛為上工位發卡,小型車輛為下工位發卡。根據超聲波測距傳感器測量到的發卡機箱體距離車輛的距離,發卡機箱體滑動裝置自動調節箱體移出距離。
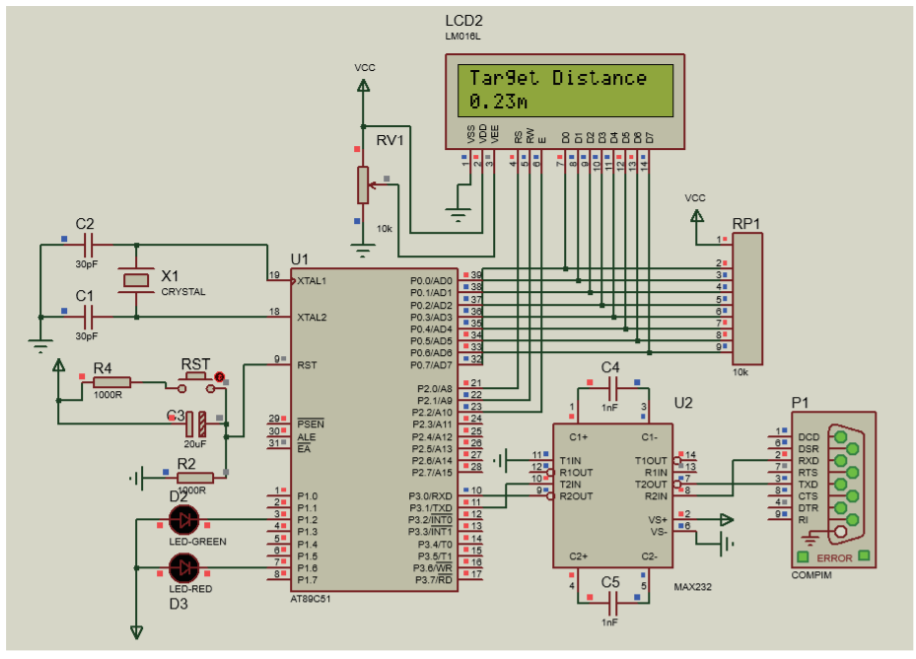
3 超聲波測距傳感器數據接口
超聲波測距傳感器采用成熟穩定可靠的超聲波雷達技術,測距范圍廣,可準確探測到0~3 m 以內的障礙物距離,測距精度可以達到1 cm,結合滑動平臺移動伸出合適距離,保證通過自動發卡車道的車輛駕駛人員能方便安全地取到通行卡,同時避免發卡機碰撞到車輛。超聲波測距傳感器通信電氣接口為單線UART 方式,高電平(+5 V)為邏輯1,低電平(0 V)為邏輯0,空閑時為高電平。整個通信協議由5 個有順序的信息碼組成,分別是P0、P1、P2、P3、P4,其中P0 固定為0xC4,P1、P2、P3、P4 分別對應4 個測距探頭(本項目采用的超聲波測距傳感器有4 個探頭)的測距數據,信息碼的波形時序圖如圖3 所示。

每個信息碼由“前導碼(010)”、8 bit 數據碼、1 個停止位組成,共12 個bits,即Pi=010+Di+1,其中i 分別為0、1、2、3、4,信息碼的每個bit 時間寬度固定為80 μs。
超聲波測距傳感器數據碼定義:P0,控制碼,固定為0×C4;P1、P2、P3、P4:對應4 個測距探頭的測距數據,在信息碼時序圖的表現為從左至右順序,單位為2 cm,取值范圍是0 ~ 150,對應的測量距離為0.0~3.0 m,例如0×10 代表32 cm。特殊值0xFF 代表無窮遠,即沒有探測到障礙物。
將超聲波測距傳感器的數據輸出線接入單片機I/O端口,并設置為外部中斷,下降沿觸發。當傳感器有測距數據輸出時,單片機觸發下降沿中斷,延時40 μs 后,打開80 μs 的定時器中斷,在定時器中斷中讀取5 個信息碼的每一位數據。
4 單片機控制程序設計
滑動平臺采用24 V直流電機控制滑動平臺的伸縮,在承載100 kg 質量情況下能平穩滑動,滑動平臺最大可伸縮距離能達到200 mm。車輛距離發卡機較遠時,滑動平臺可完全伸出200 mm,車輛距離發卡機較近時,滑動平臺可滑動合適距離而不碰撞到車輛,方便司機安全取卡或刷卡。伸縮距離依據機箱外殼上所配4 個超聲波測距傳感器探頭測量車輛距離機箱的距離而定,當距離大于設定值時,滑動平臺自動水平伸出,按鍵取卡后,機箱自動縮回原位。
主控制板單片機程序采用C 語言編寫,與匯編相比,C 語言在功能、結構性、可讀性、可維護性方面有明顯優勢,易學易用。
主控制程序主要包括車型數據接收、車檢器中斷、超聲波測距傳感器數據接收、箱體移動和剎車等工作。車型數據采用串口中斷方式接收數據包;車檢器用于檢測車輛是否停在取卡位置,為開關量信號,接入單片機的外部中斷輸入口;箱體移動包括箱體伸出和退回原位,以及加速度、恒速和減速度,由靜止狀態啟動時為加速度移動,中間移動速度為恒速移動,在接近停止位置時為減速度移動,箱體移動流程圖如圖4 所示。

5 結束語
超聲波測距傳感器具有簡單方便、易于實現、成本低、精度高、不易受環境影響等特點,可以探測透明物體,包括從玻璃和液體表面反射的回波,還能抵抗霧氣、灰塵和污垢顆粒,可穩定地探測出復雜形狀的物體,比如網格托盤、彈簧等。在3 m 測距范圍內,與紅外或激光等測距方式相比具有明顯的優勢,在日常生活中應用廣泛,如倒車輔助系統、智能導盲系統、移動機器人、液位測量等。
參考文獻:
[1] 王瑞榮.基于單片機的超聲波測距儀設計[J].電子測試,2021(5):22-23,33.
(本文來源于《電子產品世界》雜志2021年7月期)



評論