基于S3C2440的Ethercat實時工業以太網

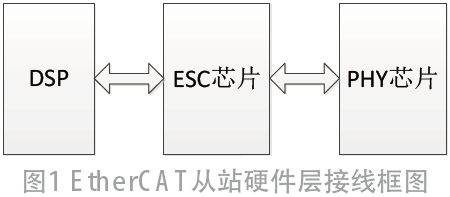
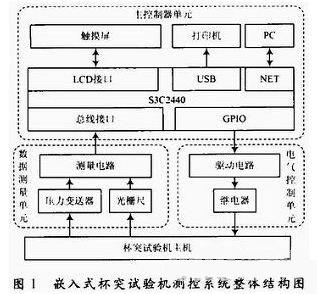
本文設計的Ethercat從站節點硬件包括從站協議控制器、從站CPU和網絡接口等部分組成。Ethercat從站中最關鍵部分是Ethercat協議控制器,它實現Ethercat的物理層與數據鏈路層的協議。現在市場上有多種Ethercat協議控制器可供使用,如FPGA實現和ASIC實現。從站CPU采用ARM920T核的S3C2440芯片。接口連接方式采用16位異步微處理器方式[7]。從站的硬件實現如圖3所示。
其中ARM控制器實現Ethercat對現場任務的收集與調度;Ethercat從站控制器實現Ethercat協議;EEPROM用于保存從站配置數據和從站描述數據;網絡接口用于主從站之間或從站與從站之間的連接,根據Ethercat從站控制器的不同網絡接口可以分別為2-4個,網絡接口采用標準以太網物理層器件就可以。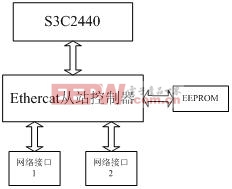
圖3 從站節點結構框圖
4 數據交換
主從站之間交換的數據主要分兩種形式:一種是周期性數據;另一種是非周期性數據。周期性數據傳輸可以根據任務的緊迫性劃分其優先級,通過采用EDF算法調度任務,把劃分好優先級的任務放入緩沖區供系統調用。緩沖區為在內存中分配的一段空間,兩端都可以訪問緩沖區中的數據;非周期性數據采用郵箱方式傳輸,此時一端寫入數據到內存,且只有此段內存寫滿后另一端才能開始從內存中讀取數據,并且只能當內存中的數據全部讀出時,才能重新寫入數據。針對這兩種數據通信方式,從站程序可以對非周期性數據通信采用查詢方式,對周期性通信采用中斷方式,程序流程圖如圖4、圖5所示[8]。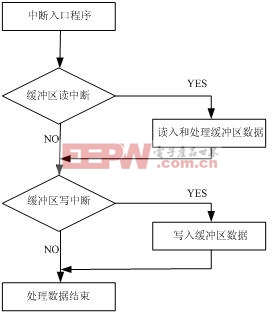
圖4 中斷方式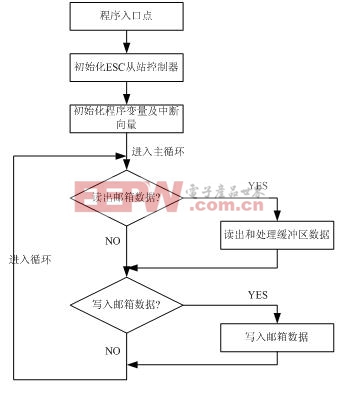
圖5 查詢方式





評論