基于STM32F103RB的兩相混合式步進電機細分驅動器設計

3.1 輸入信號
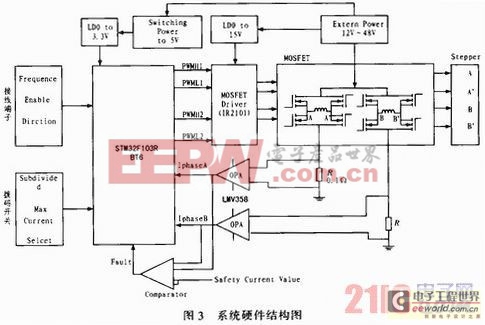
在硬件設計中,需要從外部輸入3種信號:Enable使能信號、Dir電機轉向信號以及Frequency速度脈沖信號。Enable信號為使能信號,為防止電機在停止時,定子繞組仍然通電造成的電機發熱而設置的電機轉子斷電信號。Dir信號控制電機的轉向;而Frequency信號為外部控制器件發出的方波脈沖信號,此信號的頻率將決定電機的轉速,3個控制信號均由光耦與內部隔離。驅動器上電前需通過撥碼開關設置細分數和限流值,目前細分最多支持16細分,限流值一般為電機繞組可承受的最大電流的1.2倍左右,可以設置6檔限流值。驅動器最大可承受4 A的電流。
3.2 系統電源
驅動系統的電源由一個外部輸入的24~48V的直流電源輸入接線端,然后通過BUCK降壓芯片至5 V為內部光耦、比較器和運放供電,然后將5 V通過LDO降至3.3 V給MCU供電,這樣MCU能獲得相對干凈的電源。另一路外部電源經過電阻分壓,產生一個15 V電源用于MOSFET驅動芯片IR2010的供電。
3.3 驅動電路
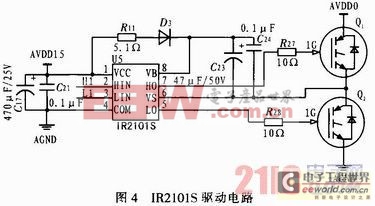
MOSFET驅動部分采用IR公司的IR2101S驅動芯片來驅動雙H橋,從而靠雙H橋來控制一個四線制步進電機。IR2101是IR公司生產的一款高性價比驅動器,使用方法非常簡單,性價比高,能輸出100~210 mA電流。IR2101驅動器可驅動一組功率管,整個功率電路需4片即可,這樣不但節約制造成本,而且還提高系統穩定性。其驅動電路如圖4所示。
3.4 電流檢測和過流保護
本系統使用采樣電阻來采集經過H橋(即電機的定子電流)。此處采樣電阻阻值比較大時,會使電阻分壓過大,造成H橋的低端電壓高于地電壓,影響系統的穩定性,而阻值太小又會使信號過小影響檢測精度,所以本系統選用0.1Ω電阻作為采樣電阻。然后經過LMV358放大后,成為0~3 V的電壓信號,在經過一個跟隨器后,進入MCU片上AD,進行數模轉換,放大后的信號還連接一個比較器用于過流保護。
4 系統軟件設計
系統軟件主程序框圖如圖5和圖6所示,圖5為主程序軟件框圖,圖6為ADC中斷軟件流程圖。

比較器相關文章:比較器工作原理
伺服電機相關文章:伺服電機工作原理








評論