基于ARM的定時繼電器驅動模板的設計


進行電力系統(tǒng)斷路器分閘操作時,還需要設計專門的重合閘放電回路,避免分閘操作之后,重合閘機構再將斷路器合上。
1.3 安全措施設計
安全、穩(wěn)定、可靠是對C板設計提出的最重要的要求,模板設計時需要采取一系列的安全措施防止裝置受到干擾后誤出口造成事故。首先,按照規(guī)程的要求設計三個繼電器串聯(lián)、分步操作驅動中間繼電器動作,減少受干擾誤出口的概率,如圖4、5所示。其次,根據(jù)EMS/SCADA系統(tǒng)遙控操作的特點,嚴格控制每次只允許1個通道控制輸出。為了防止模板受干擾出現(xiàn)多個對象同時選中的情況,CPUD內(nèi)部設計有電路自動檢測74LS273的8個輸出狀態(tài),如果出現(xiàn)多于一個狀態(tài)為高電平,則產(chǎn)生cIJR信號將74LS273的輸出狀態(tài)清除,禁止74LS273對繼電器操作。模板復位時,也產(chǎn)生CLR信號清除74LS273的狀態(tài),防止系統(tǒng)啟動時74LS273的狀態(tài)不確定,造成誤出口。第三,板上12個繼電器都通過輔助觸點設計有狀態(tài)返校(RC)電路,如圖3所示。CPU通過CPLD內(nèi)部設計的狀態(tài)緩存器可以讀取繼電器的工作狀態(tài),一旦檢測到繼電器工作狀態(tài)不正確,立即執(zhí)行軟件清除指令,將74LS273的狀態(tài)清零,并返回執(zhí)行出錯指示。第四,根據(jù)控制操作執(zhí)行的時序規(guī)定,采用741LS123設計了控制過程時間限定電路,從控制對象選擇開始計時,如果在規(guī)定時間之內(nèi)控制過程還沒有完成執(zhí)行過程,硬件自動撤消本次執(zhí)行操作,即便軟件“走死”時也能自動執(zhí)行閉鎖操作。與此同時,軟件設計的定時器也監(jiān)視著遙控執(zhí)行過程,一旦通信超時,遙控執(zhí)行確認命令沒有收到,立即執(zhí)行軟件清除指令,取消本次操作。CPLD內(nèi)部設計的控制過程閉鎖電路如圖6所示。第五,M板在執(zhí)行主站下達的遙控命令時,也會自動檢測控制對象的工作狀態(tài),如果檢測到主站命令非法,也將拒絕執(zhí)行命令。

在采取上述安全措施之后,模板上的定時繼電器輸出過程通道的安全性可以做到萬無一失了。作者近18年遠動終端(RTU)的設計與工程實踐經(jīng)驗表明,上述安全措施的可靠性非常高,至今沒有出現(xiàn)遙控誤出口的情況。
2 軟件設計
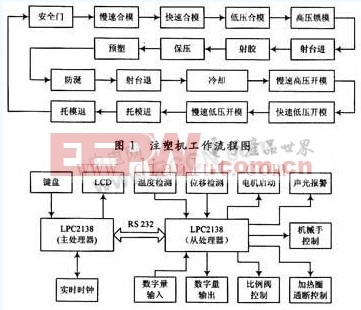
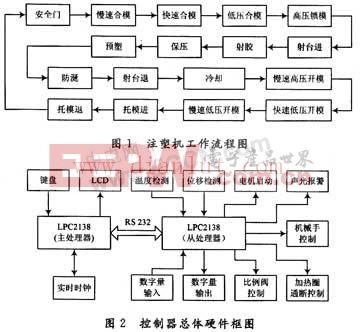
模板軟件采用μC/OS—II作為操作系統(tǒng),軟件的層次結構如圖7所示。模板的應用軟件設計主要工作包括目標板底層驅動程序的編寫和模板I/O功能的設計編程兩部分工作。

目標板底層驅動主要包括兩個異步串口中斷的中斷服務程序的編寫,分別完成與M板報文通信和與PC機VTl00超級終端仿真軟件的通信。
模板應用軟件設計主要包括3個任務程序的編寫,分別是看門狗定時器任務、與M板數(shù)據(jù)通信協(xié)議處理、VTl00超級終端命令處理等。控制輸出執(zhí)行過程在與M板數(shù)據(jù)通信協(xié)議處理任務中實現(xiàn)。
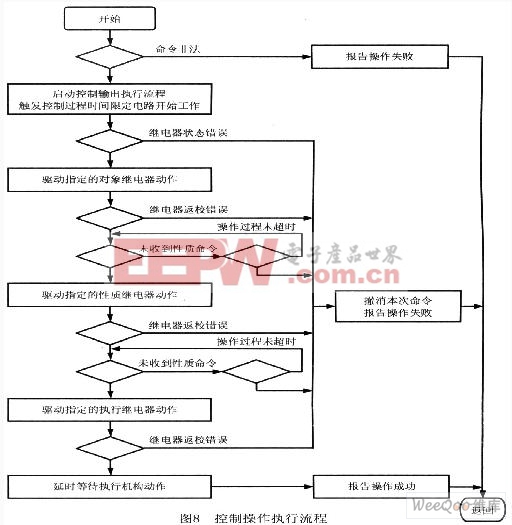
限于論文的篇幅,本文對模板軟件實現(xiàn)的細節(jié)不作詳細介紹,僅將定時繼電器輸出過程算法提取出來進行介紹。C板運行過程中,軟件靜態(tài)等待接收M板下發(fā)的輸出命令,控制指定繼電器的輸出操作,并將執(zhí)行結果反饋給M板。根據(jù)規(guī)程要求,每個對象的控制輸出都嚴格按照如下三個步驟來操作:
(1) 選擇對象操作。操作方法為:驅動指定的對象繼電器吸合,并讀取該繼電器的工作狀態(tài)進行返校。如果返校結果正確,則允許進行第二步操作,否則自動撤消本次命令。
(2) 選擇性質操作。操作方法為:先檢查第一步操作是否成功,如果第一步操作失敗或沒有進行過第一步操作,則自動撤消本次命令。如果第一步操作成功,則驅動指定的性質繼電器吸合,并讀取該繼電器的工作狀態(tài)進行返校。如果返校結果正確則允許進行第三步操作,否則自動撤消本次命令。
(3) 執(zhí)行操作。操作方法為:先檢查前面兩步操作是否成功,如果前兩步操作失敗或沒有進行過第一、二步操作,則自動撤消本次命令。如果前面兩步操作成功,則驅動指定的執(zhí)行繼電器吸合,并讀取該繼電器的工作狀態(tài)進行返校。如果返校結果正確,則報告本次輸出操作成功,否則報告本次輸出操作失敗。控制輸出操作的執(zhí)行流程如圖8所示。
3 結論
裝置定型開發(fā)完成之后,在國電北侖電廠三期、中山嘉明電廠二期UPS電源監(jiān)控和戶縣惠安化工廠19口水井的馬達自動控制中投入使用,運行結果表明,c板定時繼電器驅動的正確率和安全可靠性等性能指標符合相關標準的要求,運行穩(wěn)定可靠,達到了預期的設計目的。









評論