單片機測量頻率的設計與實現

對于周期波頻率的測量方法很多,但大多是通過測量間接計算頻率。本文介紹了用目前應用比較廣泛的MCS-51系列單片機對周期波頻率進行測量,并通過LED以數字形式直觀地示出頻率,實現測量的智能化,省去間接對頻率計算的麻煩與錯誤。文章對其測量原理,設計和實現作了說明,介紹了主要程序,并進行了誤差分析。
引言
目前單片機廣泛應用到國民經濟建設和日常生話的許多領域,成為測控技術現代化不可缺少的重要工具。而本文適應這一發展趨勢,把MCS-51系列單片機應用于對周期波頻率的測量。并通過LED顯示器自動顯示出來,這對于頻率的測量帶來了極大的方便。
設計思想
利用施密特觸發器將邊緣緩慢變化的周期性信號如正弦波、三角波或任意形狀的模擬信號變換成同頻率的矩形脈沖。通過MCS-51系列單片機內部的兩個十六位定時,計數器測量某段時間內的外加脈沖數,經過處理并通過LED直接顯示出所加信號的頻率。單片機內部的T0用來定時,T1用來計數(下降沿觸發)。當來一個計數脈沖則計數一次。在T0開始定時的同時,T1開始計數;T0定時1s時間到時,T1停止計數。方框圖如圖1所示。
硬件設計
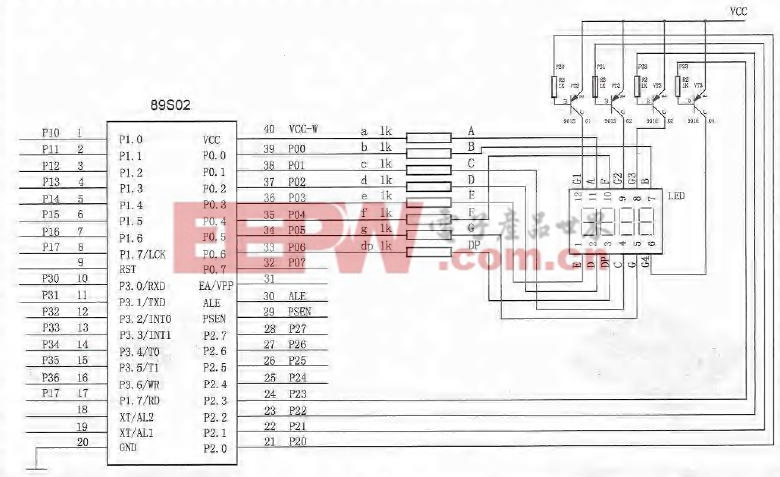
測量頻率的硬件電路主要由計數脈沖形成電路和計數顯示電路兩大部分組成。計數脈沖形成電路用"555"定時器接成施密特觸發器對外加的周期波進行變換,使之輸出為矩形脈沖。電路如圖2所示,計數顯示電路如圖3所示,主要包括:
(1)由INTEL公司生產、晶振頻率為12MHz的89S02單片機。通過軟件編程使它內部的定時器T0定時,T1對外部的所加脈沖計數。然后把測量結果值通過P0口輸出。89S02自帶8K閃存,可以有90—100個現場測量數據,供回放調檢。
(2)4位七段共陰極的LED顯示器。
(3)由于采用的是4位共陰極的動態掃描方式顯示,段代碼由89S02的P0口提供,位選線則由89S02P2口的P2.0~P2.3提供。由于89S02的輸入,輸出口不能提供足夠的灌電流,因此用G1~G4提供給LED足夠的顯示電流。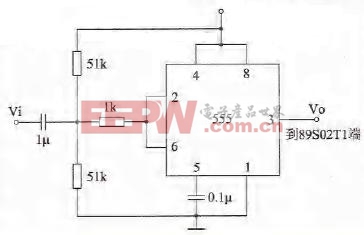
軟件設計
用MCS-51單片機測量頻率的程序主要包括:初始化程序,定時計數程序、LED顯示程序。初始化程序略。定時計數主要程序:
MOV R2,#14H ;定時20個0.05秒
ANL TMOD,#0FH;設置T0定時T1計數
ORL TMOD,#51H
MOV TH0,#3AH;置定時器初值
MOV TL0,#B1H
MOV TH1,#00H;置計數器初值
MOV TL1,#00H
SETB TR0 ;啟動定時
SETB TR1 ;啟動計數
XX:JBC TF0,LOOP ;定時溢出則轉移
SJMP XX ;否則繼續查詢
LOOP:MOV TH0,#3AH ;置定時初值
MOV TL0,#B1H
DJNZ R2,XX ;R2不等于0則轉移
CLR TR1 ;停止計數
LED顯示程序
MOV A,0H
MOV A,TL1 ;TL1值送累加器A
MOV B,#100 ;處理計數結果
DIV AB
MOV R0,B ;余數放77H單元
MOV 77H,R0
MOV 7AH,A ;商放7AH單元
MOV A,0H
MOV A,77H ;77H送累加器A
MOV B,#10 ;處理計數結果
DIV AB
MOV R0,B ;余數放78H單元
MOV 78H,R0
MOV 79H,A ;商放79H單元
(測量數據存儲程序略)
DPLOP1: MOV A,78H ;取出時間的十位數送A
MOVC A,@A+DPTR ;查表
MOV P0,A ;送P0口
CLR P2.3 ;開個位顯示
ACALL D1MS ;延時0.1秒
SETB P2.3 ;關個位顯示
MOV A,79H ;取出時間的個位數送A
MOVC A,@A+DPTR ;查表
MOV P0,A ;送P0口
CLR P2.2 ;開十位顯示
ACALL D1MS ;延時0.1秒
SETB P2.2 ;關十位顯示
MOV A,7AH ;取出時間的百位數送A
MOVC A,@A+DPTR ;查表
MOV P0,A ;送P0口
CLR P2.1 ;開百位顯示
ACALL D1MS ;延時0.1秒
SETB P2.1 ;關百位顯示
D1MS:MOV R5,#60
DJNZ R5,$
LJMP DPLOP1
RET
;段數碼管各劃的數字排列表
NUMTAB:DB
0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H;
顯示內容的對應代碼
0 1 2 3 4 5 6 7 8 9;顯示內容
測量范圍
在上述程序下的最大測量頻率為255Hz。適當調整程序后的最大測量頻率可為89S02主頻的1/12,但在保證測量精度的前提下最大測量頻率宜安排在主頻的1/100以下。
誤差分析
上述程序的最大測量頻率為255Hz,由于單片機在響應中斷的時候有2—6個機器周期,按最大誤差計算,6-2=4個機器周期,在1 s鐘中斷響應一共發生20次,最不利的累計誤差時間為4×20=80微秒,因此在此程序下的最大誤差為80/1000000=0.08/1000,這樣的精度完全能滿足現場檢測的需要。












評論