基于Simulink的復(fù)合驅(qū)動(dòng)機(jī)器人關(guān)節(jié)臂試驗(yàn)系統(tǒng)仿真分析

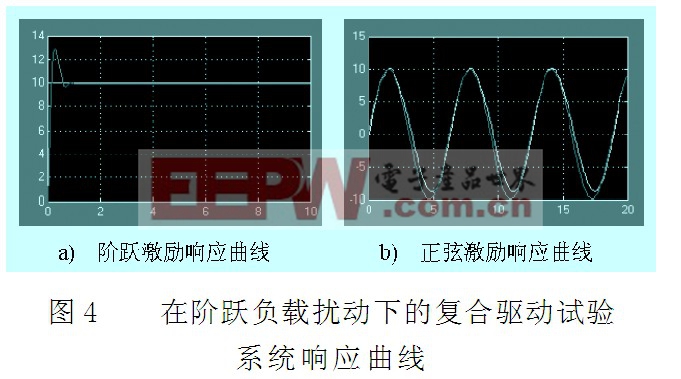
由仿真結(jié)果可知:在重載扭矩50000N●mm擾動(dòng)的情況下,階躍信號(hào)激勵(lì)響應(yīng)的超調(diào)量為20%~30%,階躍響應(yīng)上升時(shí)間不超過0.2s,響應(yīng)收斂過渡時(shí)間為1s,系統(tǒng)響應(yīng)收斂,響應(yīng)時(shí)間很快。由此仿真結(jié)果可以看出,各項(xiàng)參數(shù)設(shè)置合理。
4.2 系統(tǒng)仿真模型的PID仿真與優(yōu)化
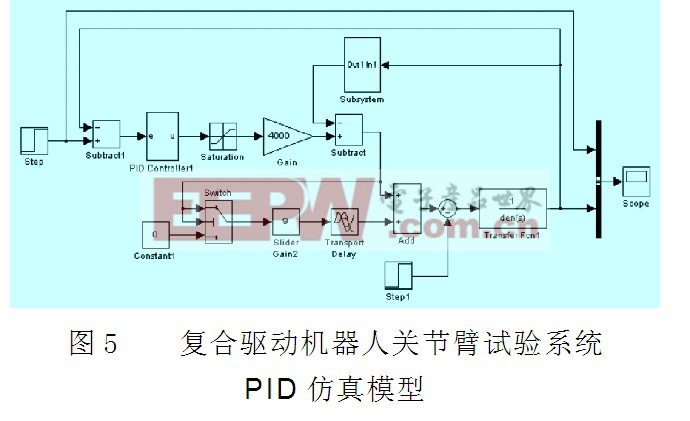
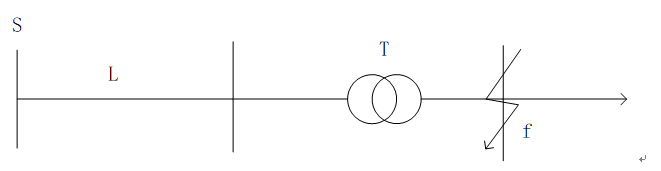
建立復(fù)合驅(qū)動(dòng)機(jī)器人關(guān)節(jié)臂試驗(yàn)系統(tǒng)PID仿真模型如圖5所示。PID控制器的參數(shù)整定采用工程整定方法,在Simulink模型仿真中,運(yùn)用pattern search算法、latin hypercube搜索方法,設(shè)計(jì)出高性能的PID控制器,得出優(yōu)化的PID控制器參數(shù)為Kp=0.0919,Ki=0.1138,Kd=0.166,其階躍激勵(lì)響應(yīng)曲線如圖6所示。
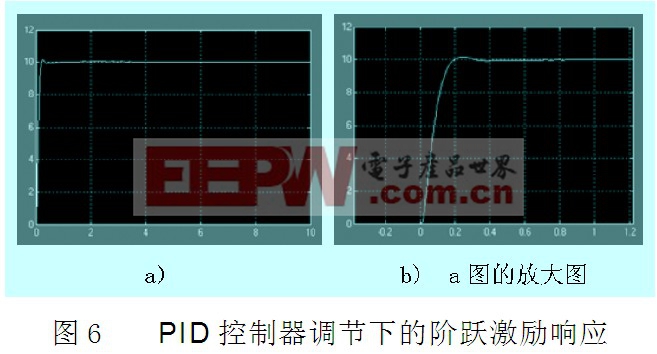
由仿真結(jié)果可知:在重載扭矩50000N●mm擾動(dòng)的情況下,階躍信號(hào)激勵(lì)的響應(yīng)上升時(shí)間小于0.1s,超調(diào)量小于1%,過渡時(shí)間小于0.2s,系統(tǒng)響應(yīng)收斂,對(duì)輸入的激勵(lì)信號(hào)表現(xiàn)出了很高的位置跟蹤精度和很快的響應(yīng)速度,遠(yuǎn)遠(yuǎn)優(yōu)于未加PID控制器的系統(tǒng)響應(yīng),達(dá)到了很好的優(yōu)化效果。
5 結(jié)束語
通過對(duì)復(fù)合驅(qū)動(dòng)機(jī)器人關(guān)節(jié)臂試驗(yàn)系統(tǒng)建立數(shù)學(xué)建模,在Matlab/Simulink中對(duì)系統(tǒng)建立PID仿真模型并優(yōu)化。由仿真結(jié)果可知:復(fù)合驅(qū)動(dòng)控制試驗(yàn)系統(tǒng)經(jīng)PID優(yōu)化后,可使該系統(tǒng)同時(shí)具有定位精度高和驅(qū)動(dòng)能力強(qiáng)的優(yōu)點(diǎn),能夠承受50000N●mm的重載扭矩?cái)_動(dòng),對(duì)重載輸入信號(hào)表現(xiàn)出很高的跟蹤精度(1%)和響應(yīng)速度(0.2s),實(shí)現(xiàn)了快速響應(yīng)的小體積高精度重載復(fù)合驅(qū)動(dòng)機(jī)器人關(guān)節(jié)臂試驗(yàn)系統(tǒng)的設(shè)計(jì)與理論研究,為復(fù)合驅(qū)動(dòng)控制技術(shù)提供了理論依據(jù)。
參考文獻(xiàn):
[1] 劉寶廷.步進(jìn)電動(dòng)機(jī)及其驅(qū)動(dòng)控制系統(tǒng)[M].哈爾濱:哈爾濱工業(yè)大學(xué)出版社,1997.
[2] 董繼先,吳春英.流體傳動(dòng)與控制[M].北京:國(guó)防工業(yè)出版社,2010.
[3] 趙應(yīng)樾.液壓馬達(dá)[M].上海:上海交通大學(xué)出版社,2000.
[4] 李琳.基于Simulink的數(shù)控機(jī)床高階伺服系統(tǒng)建模與仿真[J].機(jī)械與電子,2007,(9):22-25.

51單片機(jī)相關(guān)文章:51單片機(jī)教程
伺服電機(jī)相關(guān)文章:伺服電機(jī)工作原理
評(píng)論