基于Simulink的復合驅動機器人關節臂試驗系統仿真分析

1 引言
目前,機器人關節臂的動力源主要有步進電機、直流伺服電機、交流伺服電機或液壓系統。在要求驅動系統機械結構較小的前提下,純電機系統的定位精度較高,但相對液壓系統驅動能力小,一般只在輕載荷的環境下應用;而液壓系統驅動能力大,但達到較高的定位精度較難。在重載特別是沖擊性負載的工況下,為獲得驅動重載、精確定位的能力,不得不使用大體積的伺服電機來驅動機械臂,造成機器人的體積過大,因此應用較少,較小體積的重載機器人亟待研究開發。本文介紹了一種較小體積的重載復合驅動機器人關節臂試驗系統的設計,并對其進行了數學建模與仿真研究。
2 復合驅動機器人關節臂的結構與工作原理
復合驅動機器人關節臂試驗系統主要由電機伺服系統和液壓伺服系統組成,其結構如圖1所示。電機伺服系統主要承擔機器人關節臂的主動運動與精確定位,液壓伺服系統主要承擔機器人關節臂動態響應的輔助運動,它是一個扭矩和位移復合隨動系統。用液壓驅動系統的驅動能力強的優點來彌補電機承載能力較小的缺點,結合兩者的優點,克服機器人關節臂驅動系統出力不足的技術難題。
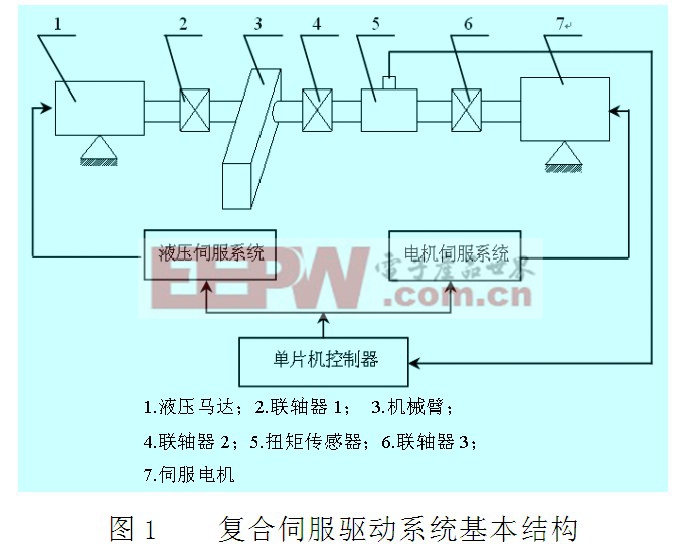
執行機構采用鉸鏈式關節型機構,因只考慮對關節臂的一個關節的控制,所以電機伺服系統采用步進電機作為驅動裝置,通過聯軸器與扭矩傳感器相連,扭矩傳感器作為信號的監測與反饋元件,扭矩傳感器再通過聯軸器與機械臂的傳動軸相連,機械臂傳動軸的另一側通過聯軸器與液壓馬達的輸出軸相連,液壓馬達作為液壓伺服系統的驅動裝置,總體上采用單片機控制器協調液壓伺服系統配合電機伺服系統工作,協調過程如下所述。
1) 電機伺服系統控制
由單片機控制器向電機伺服系統發出運動指令,驅動控制步進電機按照脈沖指令轉動相應的轉角,以此驅動機械臂動作。運動指令的脈沖個數對應步進電機的轉動角位移,運動指令脈沖的頻率對應步進電機的轉動角速度,運動指令的方向(正/負向)對應步進電機的轉動方向。
2) 液壓伺服系統控制
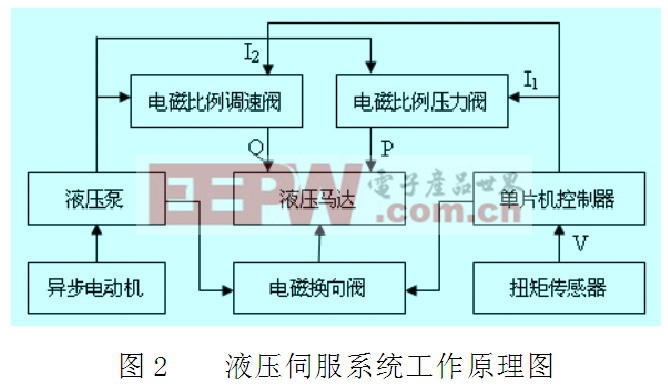
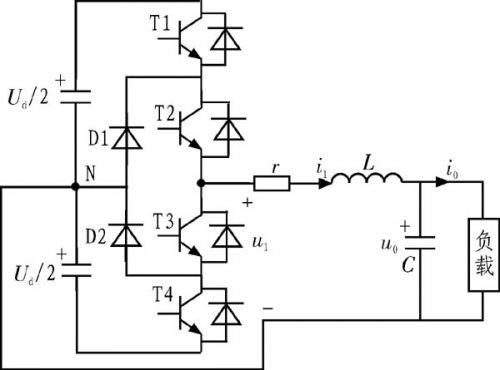
液壓伺服系統工作原理如圖2所示。扭矩傳感器檢測到步進電機輸出軸的輸出扭矩后,將扭矩信號轉換為-5v~+5v之間變化的電壓信號反饋給單片機控制器,單片機控制器根據接收到的反饋信號向液壓伺服系統發出控制信號。控制邏輯如下:

51單片機相關文章:51單片機教程
伺服電機相關文章:伺服電機工作原理
評論