基于Simulink的復合驅動機器人關節臂試驗系統仿真分析

(1) 液壓馬達轉向控制
單片機控制器根據步進電機的轉向輸出兩路開關量信號,控制電磁換向閥兩個電磁鐵的通斷,使閥芯處于左位或右位,從而起到控制液壓馬達轉向的作用,使液壓馬達與步進電機的轉向相同;
(2) 液壓馬達輸出扭矩控制
單片機控制器根據扭矩傳感器反饋信號的大小V輸出電流信號I1,控制電液比例壓力閥的調壓壓力p,起到控制液壓馬達輸出扭矩大小的作用,使步進電機承受的負載不超過其額定負載的70%;
(3) 液壓馬達轉速控制
單片機控制器根據步進電機控制脈沖信號的頻率輸出電流信號I2,控制電液比例調速閥的流量Q,起到控制液壓馬達轉速的作用,使液壓馬達跟隨步進電機同步轉動;
(4) 液壓馬達啟停控制
單片機控制器根據扭矩傳感器反饋信號的大小V與液壓馬達的啟動設定值K(步進電機額定輸出扭矩的70%)進行比較,V≥K時,控制電磁換向閥處于左位或右位,液壓馬達啟動,輔助步進電機共同驅動負載;VK時,控制電磁換向閥處于中位,液壓馬達停止,步進電機單獨驅動負載。
由此可以看出,液壓伺服系統實質上是一個位移與扭矩控制的伺服隨動系統。
通過單片機控制器的協調,使電機伺服系統的控制在液壓伺服系統的輔助驅動下實現重載荷快速高精度定位的功能,達到復合伺服驅動的目的。
3 復合驅動機器人關節臂試驗系統的數學建模
3.1 電機伺服驅動建模
設機器人關節臂的輸出角位移為![]() ,步進電機輸入角位移為
,步進電機輸入角位移為![]() ,傳動系統為剛性系統,則步進電機輸出角位移也為
,傳動系統為剛性系統,則步進電機輸出角位移也為![]() ,試驗系統采用斬波恒流驅動方式,在恒流源條件下,其轉矩為[1]
,試驗系統采用斬波恒流驅動方式,在恒流源條件下,其轉矩為[1] 
式中,![]() 為電機總電磁轉矩系數,
為電機總電磁轉矩系數,![]() 為電機轉子角位移,
為電機轉子角位移,![]() 為電機轉子實際角位移,
為電機轉子實際角位移,![]() 為步進電機有效輸出轉矩,
為步進電機有效輸出轉矩,![]() 為步進電機轉子轉動慣量,
為步進電機轉子轉動慣量,![]() 為步進電機轉子轉動時的阻尼系數,
為步進電機轉子轉動時的阻尼系數,![]() 為電機驅動系統總有效輸入轉矩,
為電機驅動系統總有效輸入轉矩,![]() 為機器人關節臂傳動軸等效轉動慣量,
為機器人關節臂傳動軸等效轉動慣量,![]() 為機器人關節臂傳動軸等效阻尼系數。
為機器人關節臂傳動軸等效阻尼系數。
對式(1)進行拉普拉斯變換,假定初始條件為0,得
3.2 液壓馬達驅動建模
本系統所用液壓馬達實際輸出扭矩[2]![]() 為
為 
式中,![]() 為液壓馬達工作壓力
為液壓馬達工作壓力![]() 為機械效率;電液比例壓力閥的比例電磁鐵的輸入電流為
為機械效率;電液比例壓力閥的比例電磁鐵的輸入電流為![]() ,比例常數為
,比例常數為![]() 。
。
液壓馬達的進口處實際流量[3![]() 為
為![]()
式中,![]() 為液壓馬達排量
為液壓馬達排量![]() ,
,![]() 為液壓馬達實際轉速
為液壓馬達實際轉速![]() ,
,![]() 液壓馬達容積效率,
液壓馬達容積效率,![]() 為液壓馬達實際角速度
為液壓馬達實際角速度![]() ;電液比例調速閥的比例電磁鐵的輸入電流為
;電液比例調速閥的比例電磁鐵的輸入電流為![]() ,比例系數為
,比例系數為![]() 。
。
由上述公式經化簡得 
對式(2)進行拉普拉斯變換,并設初始條件為0,得
4 復合驅動機器人關節臂試驗系統仿真
4.1 系統仿真模型的建立與仿真
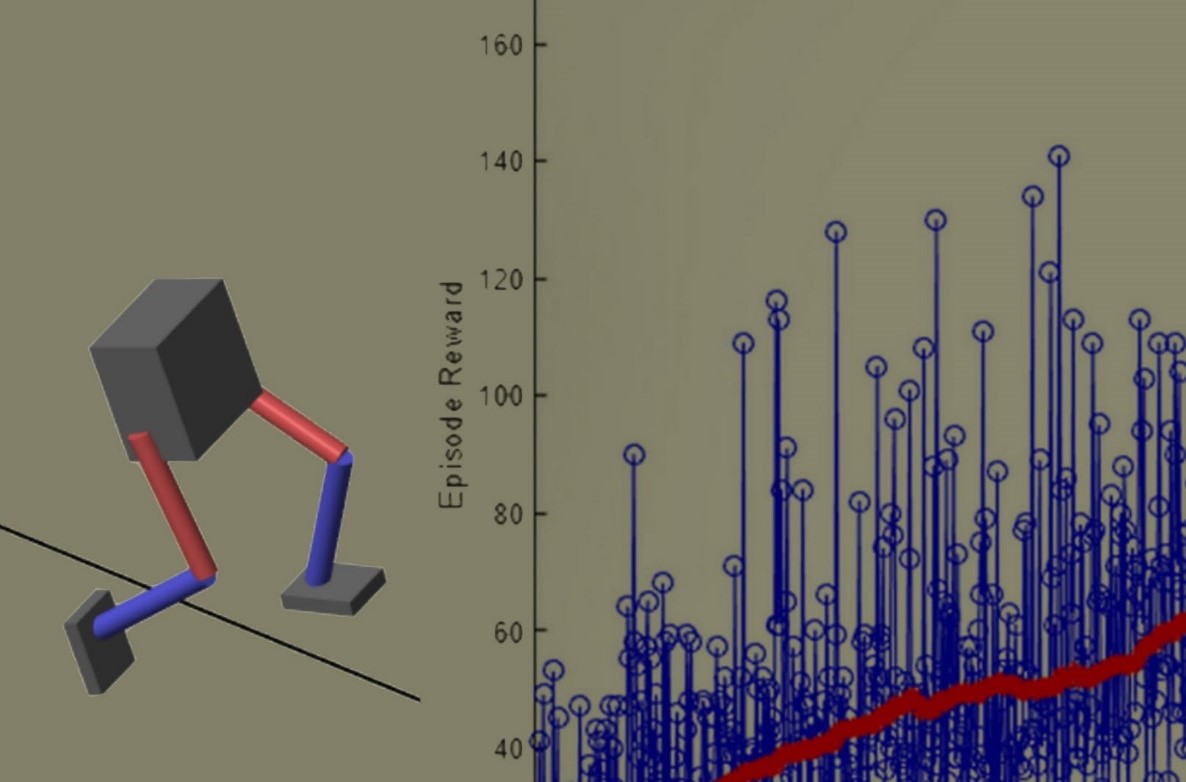
應用Matlab/Simulink軟件,根據系統的數學模型建立復合驅動系統仿真模型[4]如圖3所示,stepmotormodel是電機伺服系統的仿真子模型系統模塊,Transfer Fcn1是機器人關節臂傳遞函數模塊,Slider Gain2和Transport Delay是液壓伺服系統的增益和延遲模塊。仿真系統采用最大扭矩負荷50000N●mm作為負載擾動,采用變步長仿真算法,最大步長設置為0.1,最小步長設置為1×10-30,仿真算法采用ode45算法,延遲時間為0.02s,在輸入端In1分別輸入階躍信號和正弦信號。系統響應如圖4所示。

51單片機相關文章:51單片機教程
伺服電機相關文章:伺服電機工作原理
評論