基于S3C2410微處理器的觸摸屏設計

TS_RET結構體中的信息就是驅動程序提供給上層應用程序使用的信息,用來存儲觸摸屏的返回值。上層應用程序通過讀接口,從底層驅動中讀取信息,并根據(jù)得到的值進行其他方面的操作。
TS_DEV結構用于記錄觸摸屏運行的各種狀態(tài),PenStatus包括PEN_UP、PEN_DOWN和PEN_FLEETING。buf[MAX_TS_BUF]是用來存放數(shù)據(jù)信息的事件隊列,head、tail分別指向事件隊列的頭和尾。程序中的筆事件隊列是一個環(huán)形結構,當有事件加入時,隊列頭加一,當有事件被取走時,隊列尾加一,當頭尾位置指針一致時讀取筆事件的信息,進程會被安排進入睡眠。wq等待隊列,包含一個鎖變量和一個正在睡眠進程鏈表。當有好幾個進程都在等待某件事時,Linux會把這些進程記錄到這個等待隊列。它的作用是當沒有筆觸事件發(fā)生時,阻塞上層的讀操作,直到有筆觸事件發(fā)生。lock使用自旋鎖,自旋鎖是基于共享變量來工作的,函數(shù)可以通過給某個變量設置一個特殊值來獲得鎖。而其他需要鎖的函數(shù)則會循環(huán)查詢鎖是否可用。MAX_TS_BUF的值為16,即在沒有被讀取之前,系統(tǒng)緩沖區(qū)中最多可以存放16個筆觸數(shù)據(jù)信息。
s3c2410_fops就是內核對驅動的調用接口,完成了將驅動函數(shù)映射為標準接口。上面的這種特殊表示方法不是標準C的語法,而是GNU編譯器的一種特殊擴展,它使用名字進行結構字段的初始化,它的好處體現(xiàn)在結構清晰,易于理解,并且避免了結構發(fā)生變化帶來的許多問題。
init_module函數(shù)
這是模塊的入口函數(shù)。在函數(shù)內部通過s3c2410_ts_init( )實現(xiàn)模塊的初始化工作。在本設計中設備與系統(tǒng)之間以中斷方式進行數(shù)據(jù)交換。整個觸摸屏的驅動程序處理比較復雜,而且耗時較長,因而觸摸屏驅動程序不可能在中斷服務程序中完成。在Linux操作系統(tǒng)中一般把中斷處理切為兩個部分或兩半。中斷處理程序是上半部——接收到一個中斷,它就立即開始執(zhí)行,但只做有嚴格時限的工作,例如對接收的中斷進行應答或復位硬件。這些工作都是在所有中斷被禁止的情況下完成的,能夠被允許稍后完成的工作會推遲到下半部去。在Linux中下半部的實現(xiàn)有多種機制。按觸摸屏時,從ADS7843輸出的數(shù)值有一個抖動過程,即從ADS7846輸出的數(shù)值有一個不穩(wěn)定時期,這個過程大約為10ms。所以中斷處理程序的下半部處理函數(shù)采用內核定時器機制,使下半部在中斷發(fā)生50ms后再作處理。這樣有效地避開了ADS7843輸出值的不穩(wěn)定時期,使中斷服務程序和中斷處理任務串行化,達到了處理時間較長的觸摸屏事件的目的。驅動程序通過request_irq函數(shù)注冊并激活一個中斷處理程序,以便處理中斷。

圖2 設備驅動在內核中的掛接、卸載和系統(tǒng)調用過程
int reguest_irq(unsigned int irq, void(*handler)(int, void *, struct pt_regs *), unsigned long irq_flags, const char *dev_name, void *dev_id)
參數(shù)irq表示所要申請的中斷號;handler為向系統(tǒng)登記的中斷處理子程序,中斷產(chǎn)生時由系統(tǒng)來調用;dev_name為設備名;dev_id為申請時告訴系統(tǒng)的設備標識符;irq_flags是申請時的選項,它決定中斷處理程序的一些特性,其中最重要的是中斷處理程序是快速處理程序還是慢速處理程序。
本設計中觸摸屏控制器ADS7843的中斷輸出通過外部中斷5接在中斷控制器上,當觸摸屏上有觸摸事件發(fā)生時,會引發(fā)中斷號為IRQ_EINT5的中斷服務程序s3c2410_isr_tc()。圖3所示為該中斷處理程序的流程圖。
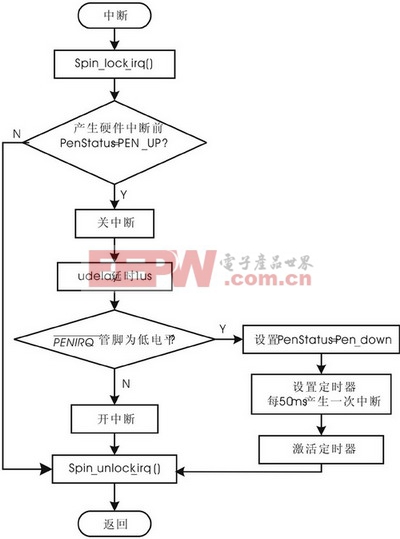
圖3 觸摸屏硬件中斷處理程序流程圖
在s3c2410_isr_tc()中設定了定時器的定時時間為50ms,并立即激活。因此有觸摸屏硬件中斷的情況下50ms后就會引發(fā)定時中斷,中斷服務程序為ts_timer_handler(),這個程序實現(xiàn)了觸摸屏中斷的下半部,即在過了抖動時間之后如果觸摸屏確實有有效事件發(fā)生則采集觸摸屏坐標,并將定時器的時間重新設為100ms并重新激活,這樣做的目的是如果觸摸筆是拖動的情況,以后每100ms采集一次坐標值,并存入緩沖區(qū),如果不是拖動在采集一次坐標值之后,在第二次進入ts_timer_handler()時,查詢管腳的狀態(tài)值,則變?yōu)楦唠娖?就將觸摸屏狀態(tài)tsdev.PenStatus設為PEN_UP,并釋放定時器,為下次觸摸屏事件做好準備,定時中斷服務程序流程圖如圖4所示。





評論