基于SOC單片機的pH值檢測與控制

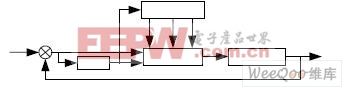
圖4 自適應模糊PID的控制框圖
將系統誤差e和誤差變化率ec變化范圍定義為模糊集上的域,e,ec={-3,-2,-1,0,1,2,3},其模糊子集為e,ec={NB,NM,NS,ZE,PS,PM,PB},子集中元素分別代表負大、負中、負小、零、正小、正中、正大。對于單片機構成的模糊控制器,考慮到占用CPU時間,節約存儲空間,減少計算量等方面的問題,隸屬度函數曲線采用三角形。根據各模糊子集的隸屬度賦值表和各參數模糊控制模型,應用模糊合成推理設計PID參數的模糊矩陣表,查出修正參數代入下式計算:在線運行過程中,控制系統通過對模糊邏輯規則的結果處理、查表和運算,完成對PID參數的在線自校正。
3 計算機仿真及結果
3.1 仿真模型的建立與算法實現
數字仿真模型如圖4所示,其中被控制對象包括:電磁閥傳遞函數 ,pH傳感器動態特性
,pH傳感器動態特性
,pH滴定曲線的非線性特性等。運用上述模糊PID參數自整定控制方法,將模糊邏輯工具箱(fuzzy logic tool box)與Matlab函數相結合,在Matlab7.1中Simulink環境下進行了仿真研究。其中,模糊推理方法采用Mamdani型推理,去模糊化采用加權平均值方法。
3.2 仿真結果分析
為了便于比較控制效果,在常規 PID 和模糊PID 控制中PID 的3 個參數kp,ki,kd 是相同的。圖5 給出了常規PID 控制與模糊PID 參數自整定算法控制仿真曲線比較,圖6 是在常規PID 控制與模糊PID 均達到穩定后,在t=80s 時加擾動仿真曲線。圖5、圖6 中虛線所標示的是常規PID 的仿真效果,實線標示的是模糊PID 的仿真效果。從仿真結果可看出:
(1)模糊PID 參數自整定控制具有較小的超調量和較短的調節時間,具有較好的動態響應特性和穩態特性,它優于常規的PID 控制;
(2)由于模糊PID 參數自整定控制能根據工況變化過程中偏差和偏差變化率自動進行PID 參數調整,因而具有較好的自適應能力。
由此可見,模糊PID 參數自調整對于pH 值的控制具有較好的控制效果,具有動態性能好,穩態精度高,抗干擾性能好及較強的魯棒性的特點。
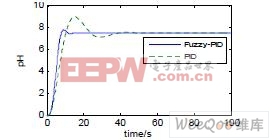
圖 5 常規PID 控制與模糊PID 控制效果比較
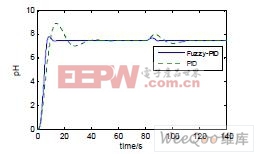
圖 6 存在擾動時的控制效果比較
4 結論
基于 SOC 高性能單片機C8051F020 設計pH 值檢測控制儀器具有性能好、抗干擾性強、有較高的性價比,針對pH 值滯后、非線性、時變、耦合性等特點采用的模糊PID 在線自適應控制方法具有動態性能好,穩態精度高,抗干擾性能好和具有較強的魯棒性。
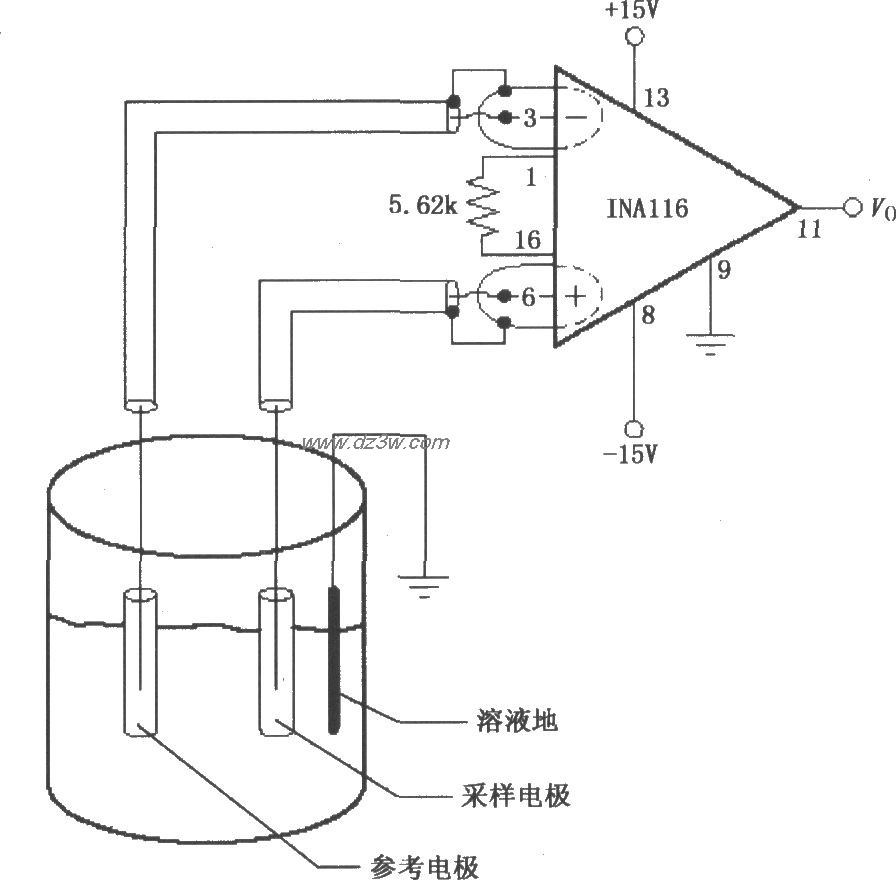
本文作者創新點:根據 pH 傳感器信號檢測的特點設計了pH 信號放大電路、抗干擾電路;根據pH 值測量原理提出了pH 電極的校正方法;根據水環境pH 值的特點采用了模糊PID 控制方法并仿真,同時與常規PID 控制效果做了比較。參考文獻:
[1].C8051F020 datasheethttp://www.dzsc.com/datasheet/C8051F020+_209830.html.
[2].MCS-51datasheethttp://www.dzsc.com/datasheet/MCS-51_477840.html.
[3].CA3140datasheethttp://www.dzsc.com/datasheet/CA3140_211595.html.

低通濾波器相關文章:低通濾波器原理
評論