基于SOC單片機的pH值檢測與控制

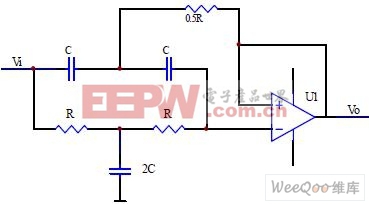
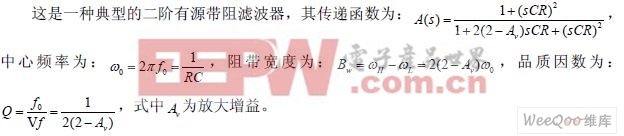
圖3 50Hz陷波電路
此外,電路板表面的漏電流也是不能忽略的,在電路板上附著了灰塵、污質,或者是在環境比較潮濕的地方電路板表面的漏電流都會變得不可忽略,會影響對pH值信號的檢測。
為減小電路板表面漏電流的影響,在電路板上CA3140的輸入端放置金屬環,并且在電路板的表層和底層都相應放置。如圖2中虛線方框所示。
1.3 pH值測量原理
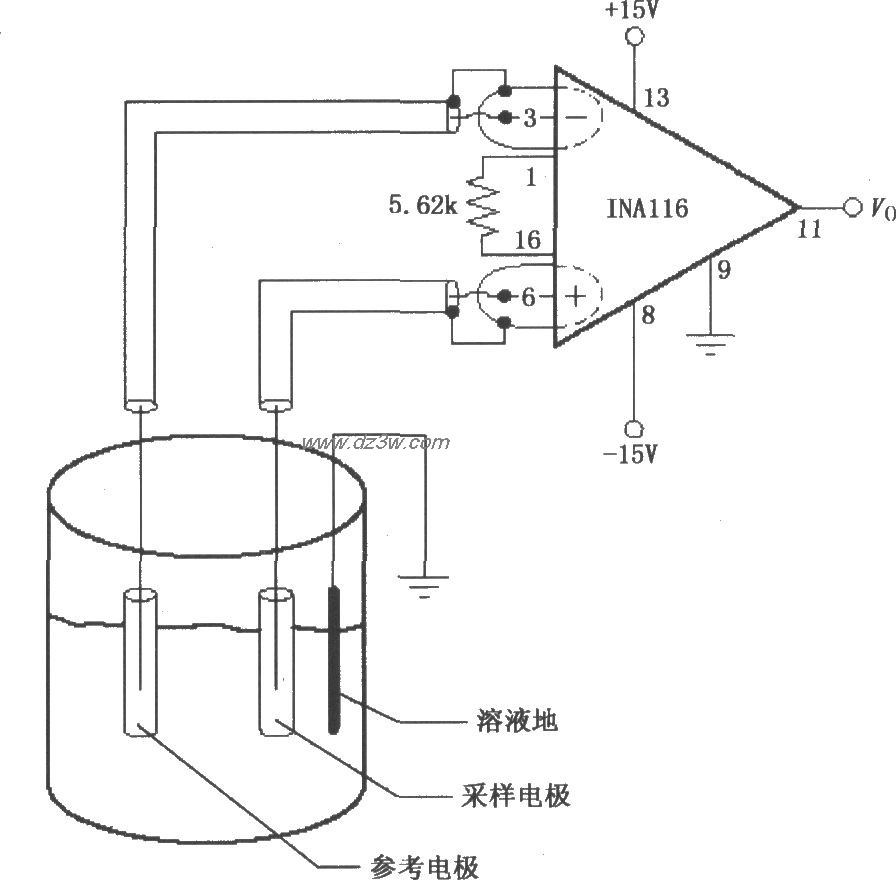
電位法測量溶液pH值常用玻璃電極作為指示電極,銀-氯化銀電極作為參比電極,將兩種電極封裝在起構成復合玻璃電極。將電極插人待測溶液,復合玻璃電極和待測溶液組成原電池,復合玻璃電極的兩條輸出引線分別為原電池的正極和負極。依據nernst方程,原電池輸出電動勢、被測溶液絕對溫度及被測溶液pH值之間滿足如下關系:

式中:E為原電池輸出電動勢,mV;E0為常數,為與電極材料、內參比溶液、內參比電極以及液接電位有關的電位差,mV;K為常數,為nernst系數;T為被測溶液的絕對溫度,K;pHx是被測溶液的pH值;Ph0是常數,為復合玻璃電極內緩沖溶液的pH值。
由式(1)可知被測溶液的pH值和溫度共同作用產生原電池輸出電動勢,因此同時測量原電池輸出電動勢和溶液溫度就能根據式(1)計算出被測溶液的pH值。
由于玻璃電極的制造工藝等原因式(1)中參數E0和K的實際值與它們的理論會有差異并且隨著電極的老化而改變,因此必須用pH值已知的標準緩沖溶液校正電極。由于水產養殖水環境呈堿性,故選用混合磷酸鹽(pH=6.86)和硼砂(pH=9.18)的標準緩沖溶液進行校正,具體校正方法如下:設兩個標準緩沖溶液的pH值分別為PH1、pH2輸出電動勢分別為E1和E2,在相同溫度T下標定,由式(1)得到溶液輸出電動勢E與pH關系如下式所示:

將兩個標準緩沖溶液的酸度pH1、pH2和對應電動勢E1、E2及算出的參數K保存在E2PROM中。由式(3)得到待測溶液的pH值。
2 控制方法[4][5]
由于水產養殖最適合的pH值范圍為:7~8.5,而且pH值同水中溫度、溶解氧、浮游植物的光合作用、魚類呼吸作用、氨氮等因子相互作用。此外,酸堿中和反應中pH值呈嚴重的非線性和滯后性,而且在中和點附近的斜率極大,而兩端的斜率急劇變小,在中和點附近具有極高的靈敏度,給控制造成很大困難;少量的雜質會使過程特性發生嚴重畸變,難以建立準確的數學模型;pH傳感器的動態特性易受環境(溫度、壓力、電極的清潔度等)變化的影響,而且外部干擾具有復雜性。
由于常規PID控制器簡單、穩定性好、可靠性高而廣泛應用于過程控制,但是常規PID控制器不能在線整定參數, 因而不能很好地控制非線性、時變的復雜系統和模型不清楚的系統。模糊控制器對復雜的和模型不清楚的系統能夠進行簡單有效地控制。因此,結合傳統PID控制器的優點,同時考慮到模糊控制實現的特點,提出了自適應模糊PID控制方法。
PID參數自整定就是先找出PID控制器的3個參數Kp,Ki和Kd與偏差e和偏差變化率ec之間的模糊關系,在運行中通過不斷檢測e和ec,根據模糊控制規則對3個參量進行在線修改,以滿足不同e和ec對控制器參數的不同要求,而使被控對象有良好的靜、動態性能。本文將偏差e和偏差變化率ec作為模糊控制器的輸入,調節PID控制器的3個參數Kp,Ki和Kd,從而控制執行機構電磁閥調節輸出。根據事先確定好的模糊控制規則作出模糊推理改變3個PID參數的值,利用模糊控制規則在線對PID參數進行修改,修正后的PID參數則被應用到常規PID控制中用以提高系統的控制性能,這構成了自適應模糊PID,其結構如圖4所示。

低通濾波器相關文章:低通濾波器原理
評論