基于飛思卡爾單片機的兩輪車控制系統設計

1.前言
本文以飛思卡爾的小車模型為對象,設計了以飛思卡爾單片機MC9S12XS128為核心,自主循跡的兩輪車自平衡控制系統。
實驗證明該方案在攝像頭導航的兩輪車系統中具有準確、快速、穩定的自主尋跡效果。
2.系統設計與原理
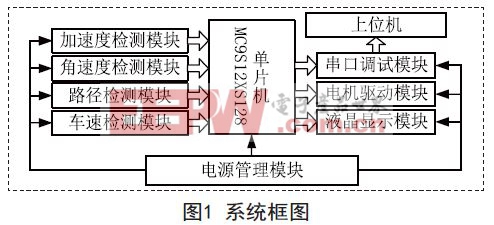
本系統以飛思卡爾公司生產的MC9S12XS128單片機為控制核心,主要由電源管理模塊、路徑檢測模塊、車速檢測塊、加速度檢測模塊、角速度檢測模塊、直流電機驅動模塊、液晶顯示模塊、串口調試等功能模塊構成。在電源管理模塊為系統提供穩定電源的基礎上,單片機把加速度和角速度檢測模塊獲得的小車姿態信息、路徑信息檢測模塊獲得的小車前進方向信息、車速檢測模塊返回的車速信息通過PID算法控制直流電機驅動模塊,以使得小車在保持直立的前提下快速地行駛。
液晶顯示模塊可以實時地顯示系統相關參數,串口調試模塊把接收到單片機的數據送往上位機,方便相關參數及波形的實時觀察和調試。系統框圖如圖1所示。
3.系統硬件設計
3.1 主控制器模塊
本系統的主控制器是飛思卡爾公司生產的16位MC9S12XS128單片機,它負責對智能車所采集到的信號進行處理并向各個功能模塊發送控制信號。MC9S12XS128單片機最高總線頻率可達40MHz,片內資源包括8KRAM、8K EEPROM和128K Flash,擁有4路8位或2路16位脈寬調制模塊(PWM)、2個8路10位A/D轉換器和帶有16位計數器的8通道定時器、UART、PIT、I2C、FTM等外部接口模塊。
3.2 電源管理模塊
可靠的電源是系統穩定運行的前提。
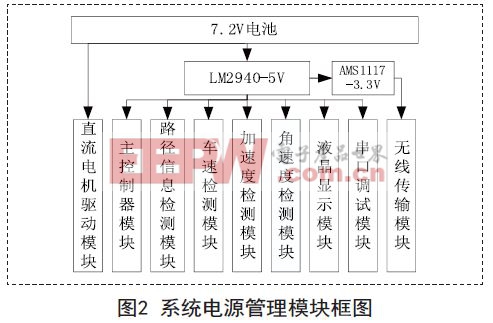
本系統采用額定電壓7 . 2 V 、額定容量2000mAh的鎳鎘電池作為動力 源。為減小電源紋波,獲得更穩定的供電電壓,本系統選用串聯線性穩壓芯片LM2940搭建5V穩壓電路,并分別向主控制器模塊、路徑信息檢測模塊、車速檢測模塊、加速度檢測模塊、角速度檢測模塊、液晶顯示模塊和串模口調試模塊供電,再經過AMS1117穩壓到3.3V,向無線傳輸模塊供電。直流電機驅動模塊則直接由電池供電。系統電源管理模塊框圖如圖2示。
3.3 路徑信息檢測模塊
由C O M S攝像頭和硬件二值化電路組成的路徑信息檢測模塊通過檢測跑道兩邊2.5cm寬的黑線來擬合賽道中心以實現路徑信息檢測。COMS攝像頭是按固定分辨率以隔行掃描的方式采集圖像上的點,并將這些點的灰度值通過圖像傳感芯片轉換成模擬電壓信號,然后采用二值化電路把此信號轉換成數字信號,通過單片機I/O口采集獲得賽道信息。硬件二值化檢測電路如圖3所示。

陀螺儀相關文章:陀螺儀原理
pid控制相關文章:pid控制原理
單片機相關文章:單片機教程
單片機相關文章:單片機視頻教程
單片機相關文章:單片機工作原理
pid控制器相關文章:pid控制器原理
加速度計相關文章:加速度計原理 脈寬調制相關文章:脈寬調制原理












評論