基于總線的分布式水下航行器控制器設計

4 數據存儲模塊
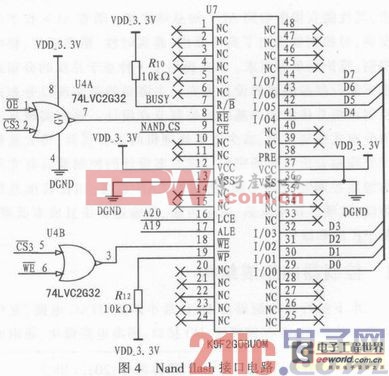
數據存儲模塊使用Nand Flash與微控制器接口來實現。Nand Flash內存是flash內存的一種,在嵌入式系統中的地位和PC機上的硬盤是類似的。具有容量大、改寫速度快、系統掉電后數據不會丟失等優點,適用于大量數據的存儲。Nand Flash的接口本質上是一個I/O接口,數據總線寬度8bit,沒有地址總線。CLE和ALE這兩條信號線用于區分總線上的數據類別。當系統對Nand Flash設備數據訪問的時候,需要先向Nand Flash設備發出相關的命令和參數,然后再讀出需要的數據。在連接中,注意用NXP2478的地址線A19與A20連接ALE和CLE引腳,這種連接方式必須在配置總線速度的時候使NXP2478總線速度和Nand Flash時序相匹配。電路中R/-(-相)引腳和寫保護引腳直接接上拉電阻。此外還有一種方案是把R/-(-還)引腳與GPIO口相連,主要目的是當讀寫Nand Flash操作完成時,這可以通過中斷來判斷一次的讀或者寫完成的時刻。Nand Flash接口電路如圖4所示。
5 通訊模塊
5.1 CAN通信模塊
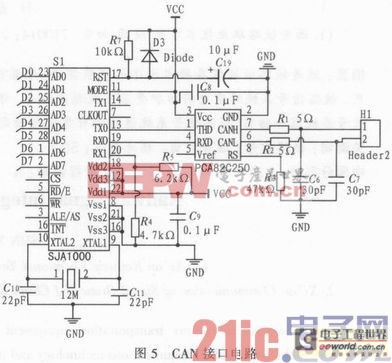
CAN總線是目前廣泛應用于汽車和飛機工業上的一種現場總線。具有以下特點:1)多主控制,在總線空閑時,所有單元都可以開始發送消息,通過沖突檢測,最先訪問總線的單元獲得發送權。如果多個主機同時發送,則優先級較高的主機獲得發送權,這就是CAN的仲裁機制。2)可發送遠程幀,主動請求遠程主機的數據。3)CAN協議具有完善的差錯功能,幀格式中含有糾錯編碼,進一步增強容錯性。4)錯誤發現功能,所有總線上的單元都可以檢測錯誤,并且檢測出錯誤的單元會立刻通知其他單元(錯誤通知功能)。正在發送消息的單元一旦檢測出錯誤,會強制結束并重新發送。直到發送成功為止。5)故障關閉功能,CAN總線可以判斷出錯誤的類型是總線上暫時的數據錯誤還是持續的數據錯誤(如某個節點硬件故障)。當總線上發生持續的數據錯誤時,可將引起故障的單元從總線上隔離出去。這些特點使得CAN特別適用于分布式現場控制。一個控制器要接入CAN總線,需要CAN控制器和CAN收發器。典型的CAN控制器有Philips公司的SJA1000,它支持CAN2.0協議,包括標準的和擴展的數據和遠程幀;位速率可編程控制,有可編程時鐘輸出;有擴展的64字節FIFO接收緩沖器;除了BasicCAN操作模式以外,還增加了一種新的操作模式——PeliCAN。在電氣特性方面,SJA1000的引腳特性與PCA200兼容,通信速率可達1 Mbps。CAN接口電路如圖5所示。AD0—AD7與微控制器的數據端口連接,片選信號與GPIO口連接,晶振使用的是12M無源晶振,另外還要設置附加的濾波電容。SJA1000的輸出還要接入CAN收發器PCA82C250,最后才接入CAN總線中。
5.2 無線通信接口
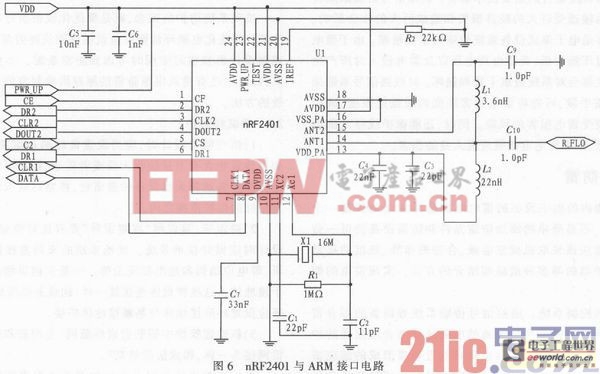
無線接口用于水下航行器的遠程控制,當航行器浮上水面時可以使用。采用基于2.4 GHz射頻收發芯片nRF2401的無線通訊子系統,工作時功耗低,所需外圍元器件很少。可配置鞭型天線或者環形天線,通訊距離約為100 m左右。可良好的滿足工作需要。無線通信芯片接口如圖6所示。
6 結束語
文中討論了一種以NXP2478為控制核心,擴展了多個I/O接口,基于CAN總線的分布式控制系統節點。搭載多種導航設備與傳感器,有很強的數據處理和通信能力,系統功耗小、靈活性高、擴展方便。用于水下航行器的控制系統中,可作為主控節點或現場控制節點。











評論