基于單片機的超聲波汽車報警系統的設計

本設計采用單片機與超聲波結合的倒車報警系統除具有普通倒車雷達的作用外,用戶還可以根據個人的需要設定汽車離阻擋物報警的距離,同時還可以實時監控到汽車倒車的時候離阻擋物的距離;另外本系統除具有語音報警外,還可通過分段指示燈,實現聲與光的實時監控。
1 系統框圖
此倒車報警系統主要是利用超聲波的特點和優勢,將超聲波測距的原理和AT89C52單片機結合于一體,設計出一種基于單片機的汽車倒車報警系統。該系統采用軟、硬件結合的方法,具有模塊化和多用化的特點。
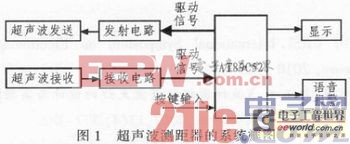
根據設計要求并綜合各方面因素,采用AT89C52單片機作為主控制器,用動態掃描法實現LED數字顯示,超聲波驅動信號用單片機產生。超聲波測距器的系統框圖如圖1所示。
2 硬件電路設計
2.1 硬件電路框圖
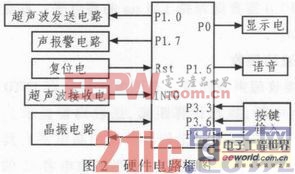
單片機AT89C52作為主控器,上電復位。XTAL1和XTAL2接12 MHz晶振與電容構成的時鐘電路。P1.0控制由555定時器及超聲波換能器CSB40T組成的發射電路發射超聲波。超聲波信號碰到障礙物時信號立刻返回,經傳感器,濾波電容,放大器,電壓比較器傳給單片機的INT0口一個低電平。P1.1、P1.2、P1.3和P1.7分別控制綠、黃、紅指示燈和蜂鳴器。P0口接4位共陽極數碼管,P2口的低四位控制數碼管的位選。其硬件框圖如圖2所示。
2.2 超聲波的計算
超聲波測距的原理如圖3所示,即超聲波發生器T在某一時刻發出一個超聲波信號,當這個超聲波信號遇到被測物體后反射回來,就會被超聲波接收器R接收到,此時只要計算出從發出超聲波信號到接收到返回信號所用的時間,就可算出超聲波發生器與反射物體的距離。
該距離的計算公式為: ![]()
其中,d為被測物與測距器的距離;s為聲波往返的路程;v為聲速;t為聲波往返所用的時間。
由于超聲波也是一種聲波,其速度v與溫度有關,在使用時,如果溫度變化不大,則可以認為聲速是基本不變的。如果測距精度要求很高,則應通過溫度補償的方法加以教正。聲速確定后,只要測得超聲波往返的時間,即可求得距離。為了增強系統的可靠性,應在軟硬件上采用抗干擾措施。
2.3 發射電路設計
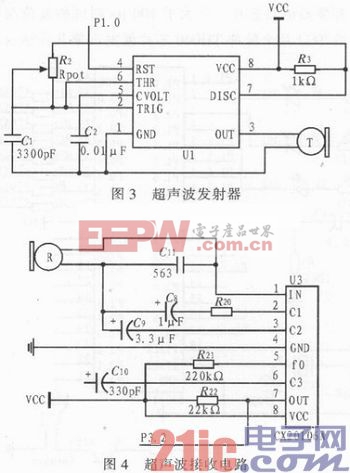
超聲波發送電路包括超聲波產生電路和超聲波發射控制電路兩個部分,超聲波探頭(又稱“超聲波換能器”)選用CSB40T。40 kHz的超聲波是利用555時基電路振蕩驅動超聲波探頭產生的。
超聲波發射電路圖如下圖3所示,其中R2為可調電阻的目的是為了調節信號頻率,使之與換能器的40 kHz固有頻率一致。
555定時器的3腳是復位端,利用它來控制超聲波脈沖的發射。當4腳為高電平時,555有振蕩脈沖輸出;為低電平時,555定時器清零,沒有輸出。因而,將4腳與單片機的控制信號相接就可以控制發射電路。為保證555時基電路具有足夠的驅動能力,宜采用+12 V電源供電。4腳為超聲波發射控制信號輸入端,由單片機P1.0進行控制。
2.4 接收電路設計
集成電路CX20106A是一款紅外線檢波接收的專用芯片,常用于電視機紅外遙控接收器。考慮到紅外遙控常用的載波頻率為38 kHz與測距的超聲波頻率40 kHz較為接近,所以可以利用它做超聲波的檢測接收電路。
超聲波測距系統的接收電路如圖4所示。超聲波接收換能器將接收到的回波信號轉換后經過0.056μF的電容初步濾波后,進入CX20106A的1腳,經過CX20106A的前置放大器,限幅放大,帶通濾波器(中心頻率為40 kHz),檢波器及比較器,最后經過內部的整形電路,從7腳輸出至AT89C52單片機的外部中斷0(P3.2)口。當芯片接收到40 kHz的信號時,7腳的輸出由高電平轉為低電平,單片機外部中斷0口檢測到輸入信號的下降沿或低電平時,立即產生中斷,同時停止定時/計數器,從而得到超聲波的回波時間t。

電路圖符號相關文章:電路圖符號大全
負離子發生器相關文章:負離子發生器原理 塵埃粒子計數器相關文章:塵埃粒子計數器原理 蜂鳴器相關文章:蜂鳴器原理 晶振相關文章:晶振原理










評論