基于MSP430單片機的智能小車尋跡模塊研究

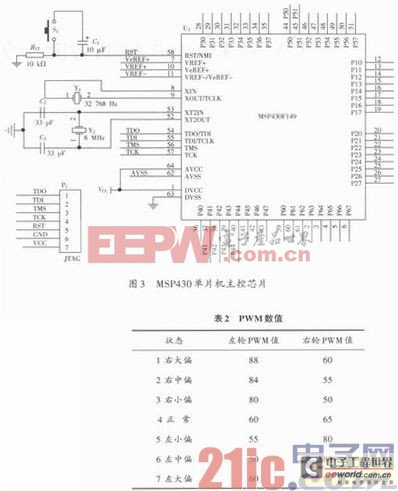
繪制完成的反射式光電傳感器電路圖如圖2所示。該電路的工作原理為:當光耦TCRT5000有光線反射回來,即遇到白色等反光能力強的跑道,放大器LM324AD的輸出端輸出為高電平,反之,輸出為低電平。單片機通過控制LM324AD的輸出端電壓即可做出相應的控制操作。四個相同的此模塊分別與單片機的P41,P42,P43,P44引腳相連。單片機模塊如圖3所示。
3 循跡模塊的軟件設計
在小車的自動控制模式下,單片機通過判斷4個尋跡模塊發送回來的不同信號進行相應的操作。整體的思路為:小車左偏則左輪的速度要大于右輪的速度小車才能恢復正常,小車右偏則右輪的速度要大于左輪的速度小車才能恢復正常,當小車正常時兩側輪子的速度相同。由上面的分析可知速度的快慢可通過對L298使能端PWM值的控制進行調節。通過多次調試可得出如表2所示的PWM數值。
4 MCU控制與算法實現
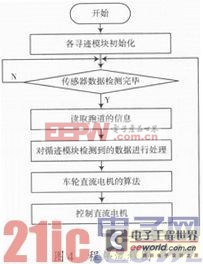
系統控制由微處理器完成,微處理器采用MSP430單片機,當單片機讀入傳感器的信號后即可判斷小車當前的行駛狀態,具體流程如圖4所示。

pwm相關文章:pwm是什么
c語言相關文章:c語言教程









評論