基于模塊化控制的多功能智能小車設計

通過嵌入模糊控制算法,實現小車精準尋跡;采用超聲波檢測障礙物使小車提前做出反應,繞過障礙物;設計靈敏度可調的趨光系統,驅動小車趨光進庫;通過金屬傳感器檢測金屬塊;利用霍爾器件測量小車行駛的路程;最終將金屬塊個數,行駛時間及路程顯示在液晶屏上,實現了友好的人機界面。實驗表明,智能小車系統能夠順利完成種各功能,在各獨立控制模塊上能達到較高的穩定性和精度要求。
0 引言
智能小車形式多樣,控制方法多變,創新性強,因此在電子競賽和科技創新方面一直受到熱捧。每年的“飛思卡爾”智能小車比賽中就分有電磁組,光電組,攝像頭組,分別通過電磁傳感器,光電傳感器,攝像頭來采集信號,檢測小車的循跡能力和運行速度;遙控小車也是在小車上裝上無線模塊來接收遙控端發來的信號,從而實現小車的智能化控制;滅火機器人則是在避障小車的基礎上加入趨光模塊和溫度傳感器,使小車趨向火源滅火。
鑒于目前基于智能小車的設計,大多都是功能單一的尋跡小車,避障小車或遙控小車,在此將設計一種將紅外對管尋跡、金屬檢測、超聲波避障、硅光電池趨光和距離測量集成在同一個系統中的多功能智能小車,實現其多任務處理功能。同時,本系統針對各模塊采用優化控制方案,以期望得到更精準控制。整個智能小車系統具有高效率、高準確度、低成本等特點。
當前對智能小車系統的控制方法也是多種多樣,常見的有路徑記憶法,模糊控制法,圖像識別法等。
這些方法對于單任務的小車控制都能達到理想的效果。在本文所設計的智能小車系統中,將充分考慮小車的多任務性,采取模塊化控制方法來實現小車的多功能控制,并在模塊化的基礎上嵌套模糊控制的方法,使小車既滿足多功能要求,又能實現各控制模塊獨立、穩定運行。
1 系統結構設計
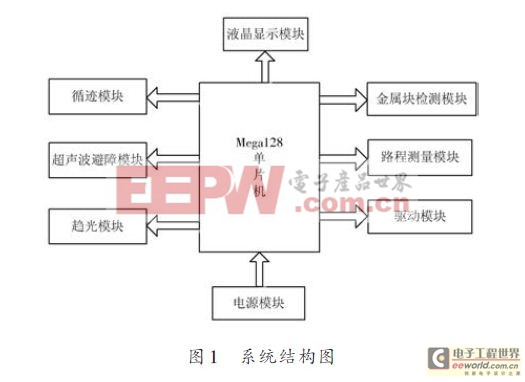
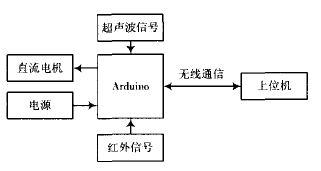
系統設計一般包括硬件設計和軟件設計。本系統中硬件設計由電源模塊、驅動模塊、尋跡模塊、金屬檢測模塊、超聲波避障模塊、硅光電池趨光模塊和顯示模塊構成,系統的整體結構如圖1所示。
1.1 驅動模塊
由單片機產生兩路PWM 波,通過L298N 電機驅動芯片控制兩個直流電機,分別驅動動左輪和右輪。直走時兩路PWM 波頻率相位相同,當需要轉彎時,改變PWM 波控制相應的電機反轉,另一電機正轉。兩邊形成差速即可實現轉彎。調整反轉的的時間,可以控制轉彎的大小和快慢,改變PWM 波的占空比可以控制小車的速度。
1.2 尋跡模塊
該模塊主要利用光電對管來檢測小車賽道上的黑線。當光電對管內的發光二極管位于黑線上時,發光二極管發出的光被黑色吸收,不能被反射回來,此時,接收端上的光電三級管基極電壓為零,三極管不能導通,輸出低電平,與之相連的比較器同相端的也為低電平,最終輸入單片機對應引腳一個低電平。單片機檢測到輸入的低電平就會對電機進行相應的處理,驅動小車轉彎,使得這個光電對管偏離黑線。一旦離開黑線,光電三級光就能夠接受到光照,三極管導通輸出高電平,給單片機引腳輸入一個高電平,單片機檢測到該高電平后給相應電機正轉命令,小車恢復直線行駛。依此循環,最終小車就能沿著黑線所設定的的軌跡行駛。
設計尋跡模塊時,為了減小環境光的干擾,可以在放大器的反向端接入一個滑線變阻器,通過調節電阻的大小,改變比較器的閾值電壓,從而改變傳感器的靈敏度。當較弱的環境光進入到光電三極管的基極,三極管的集電極會有電壓,但只要調大滑線變阻器接入的阻值,使得環境光照射時,集電極電壓低于閾值電壓,此時光電對管仍然輸出低電平,這樣就達到了消除環境光的目的。該電路接入的阻值越大,閾值越高,就越不容易受環境光的影響,但靈敏度也就越低,反應越慢。相反,就越容易受環境光影響,靈敏度越高,反應越快。
同時,為了使小車能適應不同弧度的路線,在循跡模塊中嵌入了模糊控制算法。首先建立一個模糊集合X={左偏,左較偏,左很偏,右偏,右較偏,右很偏},定義模糊規則:當左側第一個光電對管位于黑線上時,定義小車右偏,小車左輪停轉,右輪正常轉動;當左側第二個光電對管位于黑線上時,定義小車右較偏,小車左輪小幅度反轉,右輪正常轉動;當左側第三個光電對管位于黑線上時,定義小車右很偏,小車左輪大幅度反轉,右輪正常轉動。同理,對右側光電對管定義模糊規則。通過模糊控制小車就能適應多變的路線。
1.3 金屬檢測模塊
把金屬傳感器固定在小車底部,當小車經過金屬片時,金屬傳感器的輸出端會產生一次電頻跳變,將跳變信號輸入到單片機的外部中斷,每一次跳變,觸發一次中斷,單片機就會控制蜂鳴器發聲報警。將中斷次數記錄下來送到液晶顯示,就能得到檢測的金屬片個數。
1.4 超聲波避障模塊
用單片機給超聲波發生器輸入端輸入一列脈沖觸發信號,超聲波發生器的發射端就會產生一列對應頻率的超聲波,當聲波遇到障礙物(3 m以內)時就會反射回來,被接收端接受,其輸出端輸出一系列PWM波。記錄這列PWM 波的高電平持續時間,并忽略小車在此段時間內的位移,就可計算出小車到障礙物的距離,當距離達到某一設定值時,控制電機使小車轉彎,繞過障礙物。
本系統中充分利用Mega128 單片機的中斷捕捉功能,將超聲波發生器產生的輸出回響信號輸入到單片機,首先設置下降沿觸發捕捉中斷,定時器計時開始,當中斷觸發時馬上更改觸發方式為上升沿觸發,再次響應中斷時記錄此時定時器的值T1同時原計數值清零,此時記錄的高電平時間T1即為聲波在空中傳播的時間。再次更改觸發方式為下降沿觸發,實現動態實時測量。與傳統的中斷響應測量相比,中斷捕捉具有快速、精準的優點假設單片機晶振為M,分頻系數為N,聲音的傳播速度為V.聲波傳播的時間為(單位:s):

因此,可以按照下式計算出距離障礙物的距離L1:

1.5 硅光電池趨光模塊
為了使小車具有更理想的趨光效果,本系統采用硅光電池作為傳感器。當光源照射到硅光電池的表面,硅光電池的電阻值會發生變化,光照強度越大,電阻值越小。在小車前端的左中右分別裝上一個硅光電池,將光管電池接在相同的參考電壓源上,將其兩端的電壓送入單片機的采樣通道轉化成數字量,通過比較三路采樣值的大小就能判斷出哪個方向上的光照強度大,從而控制小車直走或轉彎,進而趨向光源。

pwm相關文章:pwm是什么
蜂鳴器相關文章:蜂鳴器原理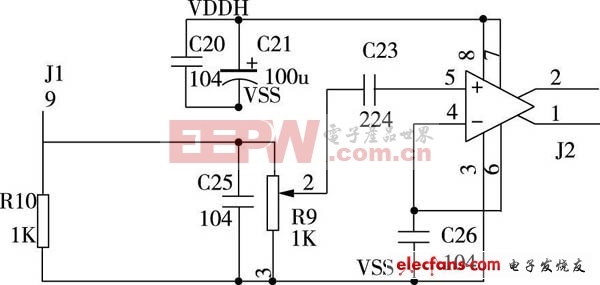

評論