一種基于ARM的航標終端設計方案

3.航標遙測
航標遙測遙控終端上電后,由終端的數據采集電路開始工作,采集航標燈的各個工作狀態,包括電源的動態電壓、靜態電壓、充電電壓、動態電流、充電電流、運行燈質等等。
為降低RTU系統的功耗,采集電路是以一定的時間間隔進行工作(可設置),每次每個參數測量至少10次,然后取平均值作為本時刻的數據,并將這些數據和存儲的中心設置參數(閥值)進行比較,判斷航標燈是否出現異常情況,如果異常,則由ARM主系統申請進行報警處理。在ARM主系統得到航標運行參數和航標位置參數后,按照規定的數據協議和GSM協議、GPRS協議,進行消息編碼,由GSM/GPRS模塊實現數據發送。系統采用GPRS實時傳輸(主)和SMS短消息(輔)兩種通信方式,主輔通信方式通過科學組合、自動適應、自動切換,采用抗干擾和過濾設計。傳送數據時采用無應答時重發,GPRS不成功轉為短消息傳送,短消息不成功重啟通信模塊重新發送,在限時內不成功自動保存,等待網絡恢復時補發。
對于處理較為復雜和實時性要求高的閃光燈燈質測量、加速度撞擊測量時,先由從CPU(LPC1114)先進行預處理后再交由主CPU(LPC1769),這樣可以保證當高性能的主CPU處于低頻省電休眠時也不會降低航標終端監測的實時性和報警的及時性,保證在終端處于休眠時也能在線監測航標燈的狀態、工作參數、撞擊情況、充電和電池情況,出現異常和超限時馬上觸發報警處理。當GPS模塊沒有關機時可對浮標的位置持續測量及報警判斷;當GSM模塊沒有關機時,監控中心可以隨時查詢其實時狀態。
4.嵌入式軟件設計
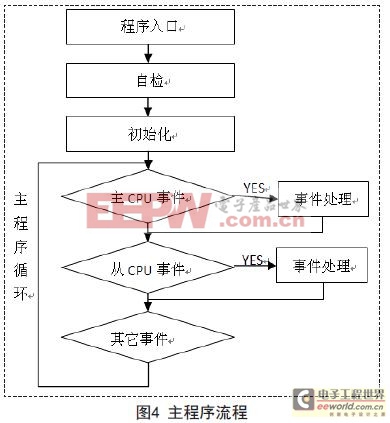
終端嵌入式軟件分為核心總控模塊、通信模塊、定位模塊、A/D檢測模塊、燈質和姿態撞擊測量等獨立模塊以及電源管理模塊。總控模塊與電源模塊協同工作,自帶看門狗,能自動檢測、自動重啟,其它模塊出現異常時會自動報警,并且可獨立工作,出現故障時不影響別的模塊工作。主程序流程如圖4所示。
5.結束語
本文提出了一種基于ARM的航標終端設計方案,為了使終端更加靈活高效的工作,本方案采用了雙CPU架構設計。在航標遙測遙控系統的控制下,以低功耗的條件實現了航標燈燈質的檢測、碰撞檢測、差分定位、遠程控制等功能,對于建設現代數字航道系統具有重要的作用









評論