基于Proteus 的PC 機對步進電機運動控制仿真

LCD顯示程序設計中因為“MODE:”是始終顯示的,所以可以在程序初始化的時候就設計好LCD的“MODE:”顯示,然后再根據數據指令顯示對應的步進電機運動狀態,這樣能節省MCU的處理時間,提高仿真系統的實時控能力。主程序體中完成最終接受來的上位機指令的處理,進而完成上位機控制步進電機的整個過程。
其中對應控制指令N,各個器件的狀態。每一個N值都意味著一條控制指令,不同N值,步進電機、LCD、上位機Text、P1口脈沖[5]會有對應的狀態內容。具體如表1所示。

3.2上位機軟件設計
上位機軟件用VB進行開發。采用Microsoft公司提供的MicrosoftCommunicationsControl串行通信編程的ActiveX控件,封裝了完整的所需的API函數,為應用程序提供了通過串行口收發數據的簡便方法。只要設置Settings屬性包括返回波特率、奇偶校驗、數據位、停止位、對應串口等參數。然后設計對應的事件處理,以達到目標通信控制效果。程序主要開發對下位機發送的七條指令及Text電機狀態顯示,實現上位機控制。
4系統仿真運行效果及仿真分析
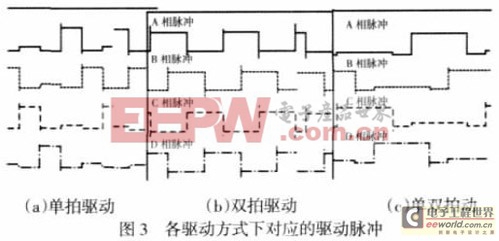
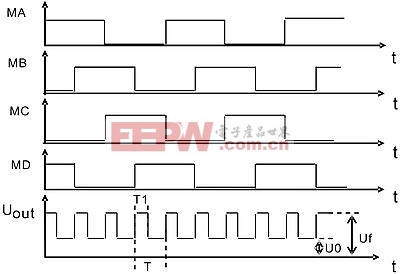
對應的單拍正轉、雙拍正轉、單雙拍正轉種情況下由虛擬示波器(OSCILLOSCOPE)采集的脈沖驅動信號,如圖3所示。結合表1的P1口脈沖,剔除正常存在的毛刺與抖動,與實際驅動所需的對應脈沖信號是完全吻合的。
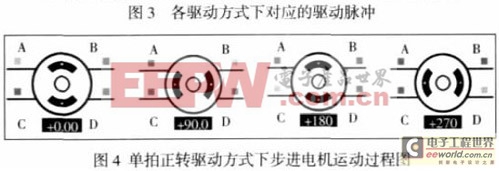
下位機在接收到單拍正轉對應圖3(a)指令后步進電機的相應運動過程,如圖4所示。此處,虛擬步進電機的虛擬步距角為90度,圖中A、B、C、D四相紅代表高電平,藍代表低電平。圖3與圖4仿真過程記錄的信息,與實際設計程序控制預期運行結果完全吻合,仿真效果明顯可信。
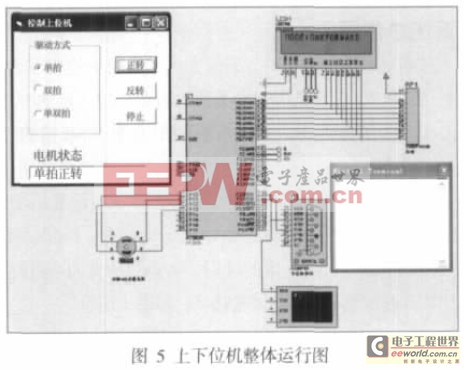
如圖5所示,下位機在運行的條件下,上位機Option單拍,單擊正轉按鈕,即上位機向下位機發送指令“1”。其中的virtualTerminal(虛擬終端),是Proteus軟件的輔助分析工具,每次串口通信的指令將會被記錄下來。步進電機會根據P1的脈沖形式做對應的運動,Proteus中LCD、上位機Text正確顯示步進電機運動狀態。
5結束語
提出了一種基于Proteus的PC機對步進電機運動控制仿真方法。所構建的仿真系統能很好的實現PC機對步進電機的同步控制與狀態顯示整體過程,通過程序設計開發與仿真系統無縫連接,實現了程序所預期要求的控制過程,并給出了豐富的實驗觀察接口,仿真實現了程序硬件調試、系統調試過程。
參考文獻
1孫耀杰,左賀,康龍云,曹秉剛,史維祥.抑制混合式步進電機轉矩波動的時變重復控制[J].中國電機工程學報,2004,24(11):183~187
2孟武勝,李亮.基于AT89C52單片機的步進電機控制系統設計[J].測控技術,2006,25(12):46~51
3張俊杰,李世其,熊友軍.基于數據手套的機械手控制技術應用[J].計算機應用研究,2006(6):170~175
4李河清,侯志祥.基于串行通信的步進電機小型集散控制系統[J].計算機工程,2007,33(10):258~260
5金建新,鄭虎子.16位單片機控制混合式步進電機的研究[J].機械設計與制造,2007(9):94~96
6李全利,遲榮強.單片機原理及接口技術[M].北京:高等教育出版社,2004(1) 塵埃粒子計數器相關文章:塵埃粒子計數器原理 晶振相關文章:晶振原理










評論