TPC單元及其在步進電機調速中的應用

步進電機在各種自動化控制系統中有著廣泛的應用,是機電一體化裝置中的關鍵部件。這是一種數字控制的電動機,是將電脈沖轉化為角位移的執行機構,它通過控制脈沖個數和脈沖頻率來控制電機的角位移量和轉動速度,從而達到準確定位和調速的目的。
傳統的步進電機所需的數字式電脈沖信號(即方波控制信號)一般都是借助數字邏輯電路來產生。隨著嵌入式技術的不斷發展,單片機的應用更為廣泛,由單片機定時來產生這種脈沖信號的場合越來越多。單片機定時控制脈沖一般有軟件定時和定時器定時兩種方式。前一種方式占用了cpu的大部分工作時間,所以常用定時器定時中斷來產生脈沖信號。由于一般的單片機系統中斷響應時間大部分在10us級以上,因而定時器定時中斷來產生脈沖的精確度大致也在10us級以上,往往不能滿足步進電機速度控制的高精度要求。為了提高脈沖控制的精確度,筆者采用瑞薩公司h8/300h系列的h8/3062f單片機中的可編程定時式樣控制器進行脈沖控制,使得脈沖信號輸出的相應時間達到o.1us級,從而能夠滿足步進電機速度控制的高精度要求。
1 可編程定時式樣控制器tpc
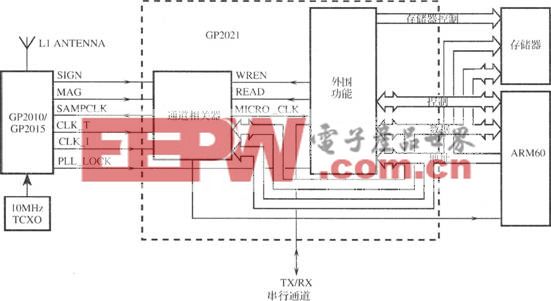
可編程定時式樣控制器tpc是瑞薩公司h8/300h系列單片機所特有的一個功能模塊,它用16位定時器作時基提供各種式樣的脈沖輸出。圖1為tpc的結構框圖。tpc的脈沖輸出分成可同時獨立運作的4組,每組4位,分別由定時器的4個通道的比較匹配信號來觸發。tpc借用了端口b和端口a的共16條引腳tp15~tp0作為其輸出,可按位開放,最多可以控制16個脈沖輸出,而輸出數據由兩端口的數據寄存器pbdr和padr以及后續數據寄存器ndrb和ndra提供。端口數據方向寄存器paddr和pbddr用于控制引腳的輸入或輸出;而后續數據允許寄存器ndera和nderb用來開放或關閉tpc的端口輸出;tpc的輸出方式寄存器tpmr用于選擇tpc每組的輸出方式;輸出控制寄存器tpcr則用于選擇tpc每組的觸發信號源,即由定時器的哪個通道觸發。其中單片機h8/3062f的定時器有3個通道,每個通道分別有3個寄存器:定時計數器tcnt、通用寄存器gra和grb。
 定時器啟動后,定時器中已選定的某通道的計數寄存器tcnt將對時鐘源的脈沖進行計數。當tcnt等于該通道的通用寄存器gra(grb)中數值時,就稱作該通道的a(b)比較匹配事件發生。這樣事先置于后續數據寄存器ndra(ndrb)的值自動被傳送到相應端口a(b)的數據寄存器padr(pbdr)對應的位,于是就更新了tpc的輸出值。
定時器啟動后,定時器中已選定的某通道的計數寄存器tcnt將對時鐘源的脈沖進行計數。當tcnt等于該通道的通用寄存器gra(grb)中數值時,就稱作該通道的a(b)比較匹配事件發生。這樣事先置于后續數據寄存器ndra(ndrb)的值自動被傳送到相應端口a(b)的數據寄存器padr(pbdr)對應的位,于是就更新了tpc的輸出值。tpc有兩種輸出方式,即不重疊輸出和正常輸出。可以通過輸出方式寄存器tpmr,來選擇tpc每組的輸出方式。不重疊輸出方式是在脈沖輸出之間可保障有不重疊裕度。在該通道的通用寄存器grb中,設置不重疊tpc輸出波形的輸出觸發周期,則不重疊裕度置于gra中,輸出值將在a比較匹配事件和b比較匹配事件發生時變化觸發。正常輸出方式,則是在gra中設置tpc輸出波形的輸出觸發周期,當a比較匹配事件發生時tpc輸出信號。根據步進電機的脈沖控制要求,這里采用的是正常輸出方式。
tpc用于步進電機脈沖控制的原理如下:首先,將通用寄存器gra選作輸出比較寄存器;然后,將tpc下一個輸出的端口值置于后續數據寄存器ndra(ndrb),再啟動定時器,當a比較匹配事件發生時發出中斷請求。在研究tpc輸出時序的過程中發現,tpc并非是在中斷響應過程中給tpc端口送值的,而是在a比較匹配事件發生的3個時鐘周期后,就把事先置于后續數據寄存器的值送到端口數據寄存器padr(pbdr),于是就更新了tpc的輸出值。由于h8/3062f系列的單片機時鐘頻率都在20 mhz以上,這樣只需不到o.2ms,就可以送出端口信號,大大縮短了響應時間,比一般的單片機在定時中斷過程中送端口信號快了幾十倍甚至上百倍,從而使對脈沖控制的更加準確。而在中斷子程序中則是更新后續數據寄存器ndra(ndrb)和輸出比較寄存器gra的值,從而改變脈沖的頻率實現對異步電機的調速。圖2為產生脈沖頻率變化的原理圖。圖中gra、gra和gra"抽象地表示3個不同的gra值,從而演示了gra值的改變對脈沖頻率的影響。
 2 步進電機的啟動、調速及加減速脈沖控制方案
2 步進電機的啟動、調速及加減速脈沖控制方案采用h8/3062f的tpc的tp15引腳和i/o口的p1.o分別控制步進電機的速度和方向。tp15輸出的脈沖送至由功率管組成的電機驅動控制電路,使功率管工作在開關狀態,步進電機停止時tp15的輸出保持高電平。這樣當tp15輸出一個負脈沖時,功率管導通,從而使步進電機前進一步,通過控制tp15輸出的脈沖頻率來實現步進電機的調速。p1.0控制步進電機的運行方向。當p1.o輸出為高電平時,步進電機前進;反之,則后退。
步進電機在負載情況下能夠正常啟動的脈沖頻率稱為"步進電機啟動頻率"。如果脈沖頻率高于該值,則電機將不能正常啟動,可能發生丟步或堵轉;同樣步進電機在制動時也應該最后以啟動頻率制動。如果要使電機達到高速轉動,那么脈沖頻率應該有個加速過程,即啟動頻率較低,然后按一定加速度升到所希望的高頻(降速過程反之)。較為理想的啟動曲線,應是按指數規律啟動,根據用戶的負載情況選擇不同的啟動頻率和不同的指數曲線,以找到一條最理想的曲線。
一般在運行控制過程中,采用"階梯升速法"將速度連續升到所需要的速度,按預置的曲線運行速度轉換時間應盡量短。為了縮短速度轉換的時間,可以采用建立數據表的方法,結合各曲線段的頻率和各段間的階梯頻率便可以建立一個連續的數據表。經過多次"試機"計算出256個脈沖頻率對應的gra值。其中:第一個為步進電機啟動頻率對應的gra值;最后一個是步進電機最大脈沖頻率對應的gra值,在軟件編程中存放在數組中,用于改變脈沖頻率,實現對步進電機的加減速控制。減速制動過程與加速啟動過程同理。圖3為階梯升速啟動示意圖。
 3 軟件程序設計
3 軟件程序設計軟件部分由1個主程序和3個子程序(tpc初始化子程序、定時器初始化子程序和中斷子程序)組成,程序用c語言編寫。tpc初始化子程序設定了tp15為輸出方式及其下一個輸出的電位,并且選擇輸出信號觸發源。定時器初始化子程序選擇了定時器時鐘源,及其計數器的清o源,并打開了定時中斷。中斷子程序實現了脈沖的輸出控制,從而實現步進電機的調速。在編程中要重點考慮一個問題,就是離目標點的距離與脈沖頻率位置變量的關系。這是是否加減速的依據。經過計算發現,當離目標點的距離大于脈沖位置變量中的值加1時,步進電機加速或者保持最高運行速度;否則就要減速,不然到達目標點時就可能無法以啟動頻率停止,從而導致制動失敗。
結語
利用h8/3062f單片機中的tpc控制步進電機的脈沖序列,可以使步進電機的運行更加快速準確,是一般單片機控制脈沖的響應速度的數十倍甚至上百倍,從而滿足步進電機調速控制的精度要求,而且tpc最多可以控制16個步進電機同步運行,因此在步進電機調速中必將有廣泛的應用。









評論