pid控制器原理

比例積分微分控制包含比例、積分、微分三部分,實(shí)際中也有PI和PD控制器。PID控制器就是根據(jù)系統(tǒng)的誤差利用比例積分微分計(jì)算出控制量,圖1.2a中給出了一個(gè)PID控制的結(jié)構(gòu)圖,控制器輸出和控制器輸入(誤差)之間的關(guān)係在時(shí)域中可用公式(1.2a)表示如下:
 (1.2a)
(1.2a)
公式中 表示誤差、控制器的輸入, 是控制器的輸出, 為比例系數(shù)、 積分時(shí)間常數(shù)、為 微分時(shí)間常數(shù)。(1.2a)式又可表示為:
 (1.2b)
(1.2b)
公式中![]() 和
和![]() 分別為
分別為![]() 和
和![]() 的拉氏變換,
的拉氏變換, 。
。![]() 、
、![]() 、
、![]() 分別為控制器的比例、積分、微分系數(shù)。
分別為控制器的比例、積分、微分系數(shù)。
比例(P)控制
比例控制是一種最簡(jiǎn)單的控制方式。其控制器的輸出與輸入誤差訊號(hào)成比例關(guān)係。當(dāng)僅有比例控制時(shí)系統(tǒng)輸出存在穩(wěn)態(tài)誤差(Steady-state error)。
積分(I)控制
在積分控制中,控制器的輸出與輸入誤差訊號(hào)的積分成正比關(guān)係。
對(duì)一個(gè)自動(dòng)控制系統(tǒng),如果在進(jìn)入穩(wěn)態(tài)後存在穩(wěn)態(tài)誤差,則稱這個(gè)控制系統(tǒng)是有穩(wěn)態(tài)誤差的或簡(jiǎn)稱有差系統(tǒng)(System with Steady-state Error)。為了消除穩(wěn)態(tài)誤差,在控制器中必須引入“積分項(xiàng)”。積分項(xiàng)對(duì)誤差取關(guān)於時(shí)間的積分,隨著時(shí)間的增加,積分項(xiàng)會(huì)增大。這樣,即便誤差很小,積分項(xiàng)也會(huì)隨著時(shí)間的增加而加大,它推動(dòng)控制器的輸出增大使穩(wěn)態(tài)誤差進(jìn)一步減小,直到等於零。
因此,比例+積分(PI)控制器,可以使系統(tǒng)在進(jìn)入穩(wěn)態(tài)後無(wú)穩(wěn)態(tài)誤差。
微分(D)控制
在微分控制中,控制器的輸出與輸入誤差訊號(hào)的微分(即誤差的變化率)成正比關(guān)係。
自動(dòng)控制系統(tǒng)在克服誤差的調(diào)節(jié)過(guò)程中可能會(huì)出現(xiàn)振蕩甚至失穩(wěn)。其原因是由於存在有較大慣性的元件(環(huán)節(jié))和(或)有滯後(delay)的元件,使力圖克服誤差的作用,其變化總是落後於誤差的變化。解決的辦法是使克服誤差的作用的變化要有些“超前”,即在誤差接近零時(shí),克服誤差的作用就應(yīng)該是零。這就是說(shuō),在控制器中僅引入“比例”項(xiàng)往往是不夠的,比例項(xiàng)的作用僅是放大誤差的幅值,而目前需要增加的是“微分項(xiàng)”,它能預(yù)測(cè)誤差變化的趨勢(shì),這樣,具有比例+微分的控制器,就能夠提前使克服誤差的控制作用等於零,甚至為負(fù)值,從而避免了被控量的嚴(yán)重地沖過(guò)頭。
所以對(duì)有較大慣性和(或)滯後的被控對(duì)象,比例+微分(PD)的控制器能改善系統(tǒng)在調(diào)節(jié)過(guò)程中的動(dòng)態(tài)特性。
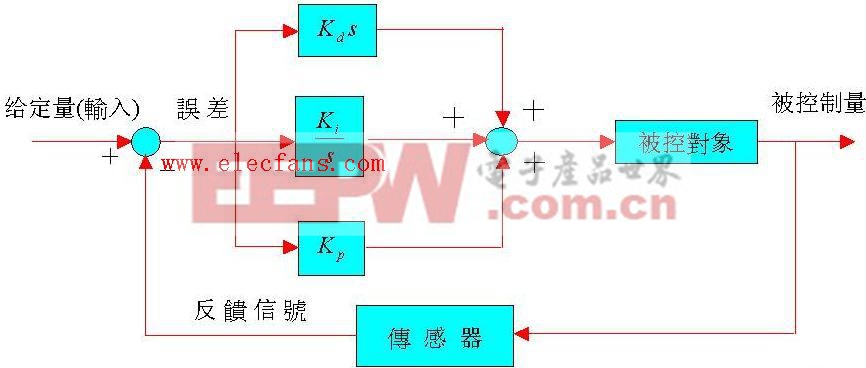
圖 1.2a PID控制的結(jié)構(gòu)圖
當(dāng)今的自動(dòng)控制技術(shù)都是基于反饋的概念。反饋理論的要素包括三個(gè)部分:測(cè)量、比較和執(zhí)行。測(cè)量關(guān)心的變量,與期望值相比較,用這個(gè)誤差糾正調(diào)節(jié)控制系統(tǒng)的響應(yīng)。
這個(gè)理論和應(yīng)用自動(dòng)控制的關(guān)鍵是,做出正確的測(cè)量和比較后,如何才能更好地糾正系統(tǒng)。
PID(比例-積分-微分)控制器作為最早實(shí)用化的控制器已有50多年歷史,現(xiàn)在仍然是應(yīng)用最廣泛的工業(yè)控制器。PID控制器簡(jiǎn)單易懂,使用中不需精確的系統(tǒng)模型等先決條件,因而成為應(yīng)用最為廣泛的控制器。
PID控制器由比例單元(P)、積分單元(I)和微分單元(D)組成。
比例(P)調(diào)節(jié)作用:是按比例反應(yīng)系統(tǒng)的偏差,系統(tǒng)一旦出現(xiàn)了偏差,比例調(diào)節(jié)立即產(chǎn)生調(diào)節(jié)作用用以減少 偏差。比例作用大,可以加快調(diào)節(jié),減少誤差,但是過(guò)大的比例,使系統(tǒng)的穩(wěn)定性下降,甚至造成系統(tǒng)的不穩(wěn)定。
積分(I)調(diào)節(jié)作用:是使系統(tǒng)消除穩(wěn)態(tài)誤差,提高無(wú)差度。因?yàn)橛姓`差,積分調(diào)節(jié)就進(jìn)行,直至無(wú)差,積分調(diào)節(jié)停止,積分調(diào)節(jié)輸出一常值。積分作用的強(qiáng)弱取決與積分時(shí)間常數(shù)Ti,Ti越小,積分作用就越強(qiáng)。反之Ti大則積分作用弱,加入積分調(diào)節(jié)可使系統(tǒng)穩(wěn)定性下降,動(dòng)態(tài)響應(yīng)變慢。積分作用常與另兩種調(diào)節(jié)規(guī)律結(jié)合,組成PI調(diào)節(jié)器或PID調(diào)節(jié)器。
微分(D)調(diào)節(jié)作用:微分作用反映系統(tǒng)偏差信號(hào)的變化率,具有預(yù)見(jiàn)性,能預(yù)見(jiàn)偏差變化的趨勢(shì),因此能產(chǎn)生超前的控制作用,在偏差還沒(méi)有形成之前,已被微分調(diào)節(jié)作用消除。因此,可以改善系統(tǒng)的動(dòng)態(tài)性能。在微分時(shí)間選擇合適情況下,可以減少超調(diào),減少調(diào)節(jié)時(shí)間。微分作用對(duì)噪聲干擾有放大作用,因此過(guò)強(qiáng)的加微分調(diào)節(jié),對(duì)系統(tǒng)抗干擾不利。此外,微分反應(yīng)的是變化率,而當(dāng)輸入沒(méi)有變化時(shí),微分作用輸出為零。微分作用不能單獨(dú)使用,需要與另外兩種調(diào)節(jié)規(guī)律相結(jié)合,組成PD或PID控制器。
其輸入e (t)與輸出u (t)的關(guān)系為:后補(bǔ)
,使用中只需設(shè)定三個(gè)參數(shù)(Kp,Ki和Kd)即可。在很多情況下,并不一定需要全部三個(gè)單元,可以取其中的一到兩個(gè)單元,但比例控制單元是必不可少的。
首先,PID應(yīng)用范圍廣。雖然很多工業(yè)過(guò)程是非線性或時(shí)變的,但通過(guò)對(duì)其簡(jiǎn)化可以變成基本線性和動(dòng)態(tài)特性不隨時(shí)間變化的系統(tǒng),這樣PID就可控制了。
其次,PID參數(shù)較易整定。也就是,PID參數(shù)Kp,Ki和Kd可以根據(jù)過(guò)程的動(dòng)態(tài)特性及時(shí)整定。如果過(guò)程的動(dòng)態(tài)特性變化,例如可能由負(fù)載的變化引起系統(tǒng)動(dòng)態(tài)特性變化,PID參數(shù)就可以重新整定。
第三,PID控制器在實(shí)踐中也不斷的得到改進(jìn),下面兩個(gè)改進(jìn)
的例子。
在工廠,總是能看到許多回路都處于手動(dòng)狀態(tài),原因是很難讓過(guò)程在“自動(dòng)”模式下平穩(wěn)工作。由于這些不足,采用PID的工業(yè)控制系統(tǒng)總是受產(chǎn)品質(zhì)量、安全、產(chǎn)量和能源浪費(fèi)等問(wèn)題的困擾。PID參數(shù)自整定就是為了處理PID參數(shù)整定這個(gè)問(wèn)題而產(chǎn)生的。現(xiàn)在,自動(dòng)整定或自身整定的PID控制器已是商業(yè)單回路控制器和分散控制系統(tǒng)的一個(gè)標(biāo)準(zhǔn)。
在一些情況下針對(duì)特定的系統(tǒng)設(shè)計(jì)的PID控制器控制得很好,但它們?nèi)源嬖谝恍﹩?wèn)題需要解決:
如果自整定要以模型為基礎(chǔ),為了PID參數(shù)的重新整定在線尋找和保持好過(guò)程模型是較難的。閉環(huán)工作時(shí),要求在過(guò)程中插入一個(gè)測(cè)試信號(hào)。這個(gè)方法會(huì)引起擾動(dòng),所以基于模型的PID參數(shù)自整定在工業(yè)應(yīng)用不是太好。
如果自整定是基于控制律的,經(jīng)常難以把由負(fù)載干擾引起的影響和過(guò)程動(dòng)態(tài)特性變化引起的影響區(qū)分開(kāi)來(lái),因此受到干擾的影響控制器會(huì)產(chǎn)生超調(diào),產(chǎn)生一個(gè)不必要的自適應(yīng)轉(zhuǎn)換。另外,由于基于控制律的系統(tǒng)沒(méi)有成熟的穩(wěn)定性分析方法,參數(shù)整定可靠與否存在很多問(wèn)題。
因此,許多自身整定參數(shù)的PID控制器經(jīng)常工作在自動(dòng)整定模式而不是連續(xù)的自身整定模式。自動(dòng)整定通常是指根據(jù)開(kāi)環(huán)狀態(tài)確定的簡(jiǎn)單過(guò)程模型自動(dòng)計(jì)算PID參數(shù)。
但仍不可否認(rèn)PID也有其固有的缺點(diǎn):
PID在控制非線性、時(shí)變、耦合及參數(shù)和結(jié)構(gòu)不確定的復(fù)雜過(guò)程時(shí),工作地不是太好。最重要的是,如果PID控制器不能控制復(fù)雜過(guò)程,無(wú)論怎么調(diào)參數(shù)都沒(méi)用。雖然有這些缺點(diǎn),PID控制器是最簡(jiǎn)單的有時(shí)卻是最好的控制器











評(píng)論