基于CCD的全自動焦度計光學圖像系統設計

1 全自動焦度計光學算法推導
1.1 全自動焦度計的工作原理
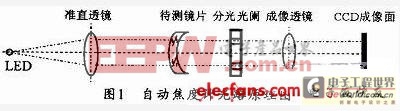
圖1為自動焦度計的光路原理圖。點光源發出的光,經準直鏡準直,照射到被測眼鏡片上發生偏折,再經過分光光闌和測量透鏡投射到CCD上,在CCD上得到含有數學模型的圖像。由于被測鏡片的屈光狀態不一樣,在CCD上所成像的大小、位置和形狀會發生變化,通過CCD接收和微機對圖像位置形狀的處理,可得到被測鏡片的相關參數。
1.2 16點數學模型
圖2為無測量鏡片,即OD時,CCD上的成像分布圖。當被測鏡片為負球面鏡時,十六個光斑相對于初始位置對稱地擴張;當被測鏡片為正球面鏡時,十六個光斑相對于初始位置對稱地收縮。將16個光斑按圖3虛線所示分成四組。分別求出X方向或者Y方向上兩個像點之間的距離,即可得到被測球鏡的頂焦度S值。設四組光斑求出的頂焦度值為S1、S2、S3和S4,則S值為
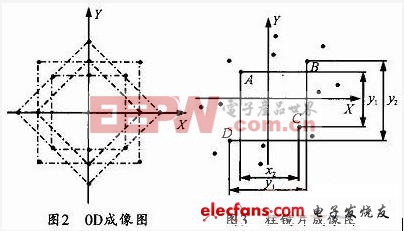
當被測鏡片為柱面鏡時,CCD上的光斑分布圖如3所示。由于柱面鏡含有兩個主頂焦度,因此,16個光斑成不對稱分布。現以其中一組光斑(4個測量點)為例推導柱面鏡主頂焦度的計算方法。設A點與C點在X軸方向上的距離為x2,在Y軸方向上的距離為y1;設B點與D點在X軸方向上的距離為x1,在Y軸方向上的距離為y2。假設D1、D2分別為柱面鏡的兩個主頂焦度,θ為柱面鏡的軸角。有以下方程成立

其余三組光斑的計算方法同上,在這里不再累述。不防設四組光斑計算出的柱面鏡頂焦度值為C1、C2、C3和C4,軸角為θ1、θ2、θ3和θ4,則柱面鏡的頂焦度C值和軸角為

2 全自動焦度計的圖像處理系統
根據自動焦度計的工作原理以及系統所要實現的功能設計出硬件系統。系統由兩大部分組成:數據采集系統和數據處理系統。數據采集系統由CCD、A/D、AVR單片機和FIFO存儲器組成,主要負責采集數據并將數據存儲到FIFO存儲器;數據處理系統由FPGA、LCD、FIFO存儲器、鍵盤、和LED光源組成,主要負責對采集的數據進行分析和計算,并將計算結果輸出顯示或打印。
CCD是面陣敏感元件,在積分的時間內,CCD敏感元件上積累電荷,當積分完畢,將電荷數據依次移出。由于電荷數據是微弱的模擬量,須經信號放大,再經A/D轉換得到本系統所需的數字量。為了減小對FPGA的CPU的占用率,在CCD采樣板上設置一存儲器,將轉換完的數據暫存一下,以供FPGA系統讀取。當光路中無測量鏡片時,FPGA讀取CCD的采集數據,計算出光斑的中心位置,并將計算結果作為系統的初始參數。當光路中插入被測鏡片時,分劃板在CCD上的成像位置將發生變化,位置的變化量與被測鏡片的球鏡度和柱鏡度有相互對應的比例關系。FPGA接收像的位置信息經變換后計算出被測鏡片的相關參數。
3 圖像的二值化處理
由上述系統可以看出,圖像處理的好壞會直接影響測量的精度和穩定性。由于圖像采集設備CCD采用PAL制,所以系統要求FPGA處理一幀圖像的時間不超過20ms。圖像二值化算法的選擇標準為簡單有效,易于實現。故本系統采用最大類間方差閾值分割算法。最大類間方差法的基本思想是把圖像中的像素按灰度值用閾值t分成兩類A和B。A由灰度值在0-t之間的像素組成,B由灰度值在t+1-L-1(L為圖像灰度級數)之間的像素組成,按下式計算A和B之間的類間方差
式中wA(t)為A中所包含的像素數,wB(t)為B中所包含的像素數。uA(t)為A中所有像素的平均灰度值,uB(t)為B中所有像素的平均灰度值。u(t)為全圖的平均灰度值。
從0到L-1依次改變t值,取使δ(t)為最大的t值作為最佳閡值T。
通常一個光斑的中心坐標應為該光斑的圓心。但是,經過FPGA處理后的圖像由于離散化,已不是規則排列,故采用質心計算法求出光斑的中心。首先設光斑由n個像素組成,每個像素對應的空間坐標為(xi,yi),灰度值為p(xi,yi),則該光斑的質心坐標為
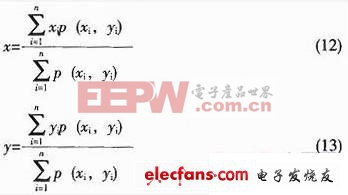
由于xi和yi是FPGA內存圖像的質心坐標,通過一定的當量換算可折算成實際圖像中光斑的中心坐標。將各點的中心坐標帶入式(7)-(10),即可求出被測鏡片的相關參數。
4 結束語
文中提出了一種新的全自動焦度計的測量圖像,并建立了相應的計算方法。運用該系統測量系列標準鏡片,技術指標已達到國家相關檢驗標準。與


評論