嵌入式組合控制直線一級倒立擺系統(tǒng)

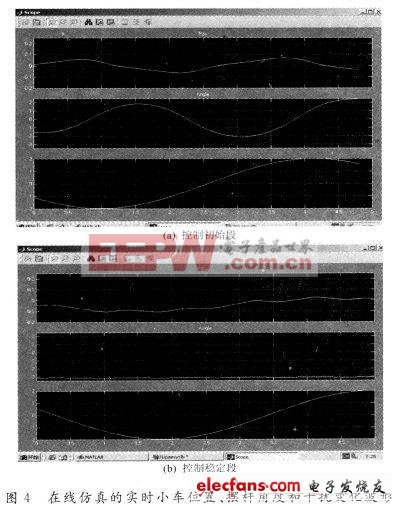
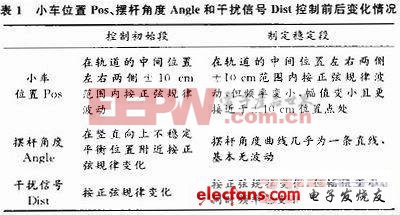
嵌入式組合式控制器控制過程中小車位置Pos、擺桿角度Angle和干擾信號Dist的在線仿真響應(yīng)波形變化情況分析如表1所示。結(jié)果表明本文提出的嵌入式組合式控制算法對直線單級倒立擺系統(tǒng)的控制正確、有效。能夠達到自動和安全的控制效果,滿足系統(tǒng)的設(shè)計要求。
4 結(jié)論
本文根據(jù)線性系統(tǒng)理論、最優(yōu)控制理論和自動控制原理沒計了組合式控制器,其可行性和有效性在單級直線倒立擺系統(tǒng)上得到了驗證。該控制器具有簡單、直觀和易于實現(xiàn)的特點。只要擺桿的初始角度在±20°范圍內(nèi),嵌入式組合控制器都能使倒立擺控制系統(tǒng)保持穩(wěn)定的倒立平衡狀態(tài)。本文建立的實驗平臺也可作為控制系學生的《自動控制原理》課程設(shè)汁實驗及考核平臺。
linux操作系統(tǒng)文章專題:linux操作系統(tǒng)詳解(linux不再難懂)
伺服電機相關(guān)文章:伺服電機工作原理







評論