基于超聲傳感技術的視覺自動識別系統

為使機械手能以正確的姿態準確地抓取物體,必須精確確定物體的軸向. 在幾何學中,物體的長軸定義為通過物體形心點的一條直線, 物體關于該直線的二階矩為最小值. 設圖像中物體長軸與圖像平面X 軸正方向夾角為θ, 規定| θ| ≤π/ 2 ,則物體關于該軸線的二階矩為

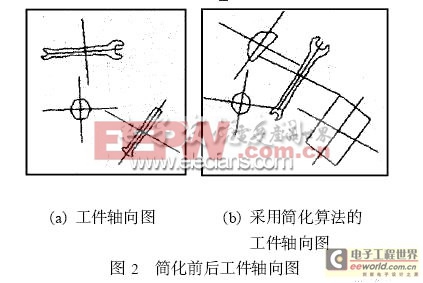
很明顯,基于二階慣性矩的軸向確定方法是對整個物體區域進行運算, 且必須先確定像素點的隸屬區域,故運算量較大. 圖2 (a) 是用該算法確定的工件軸向. 對于一些簡單形狀的物體,可采用如下簡單軸向估計算法:
a. 確定物體的形心坐標;
b. 確定物體邊緣輪廓閉合曲線前半段中離物體形心最近的點, 用最小二乘法估算該點的切線方向,設其與圖像平面X 軸正方向夾角為α1 ;
c. 用同樣方法確定下半段曲線中對應的切線方向α2 ;
d. 物體軸向可粗略估計為θ= (α1 +α2) / 2.
圖2 ( b) 是采用簡化算法得到的工件軸向圖. 該算法僅對物體邊緣輪廓點進行處理,使運算時間大為減少.
3 超聲深度檢測
由于CCD 攝像頭獲取的圖像不能反映工件的深度信息,因此對于二維圖形相同,僅高度略有差異的工件,只用視覺信息不能正確識別,本文采用超聲波測距傳感器則可彌補這一不足. 經圖像處理得到工件的邊緣、形心等特征量后,引導機械手到達待測點,對工件深度進行測量,并融合視覺信號與超聲信號,可得到較完整的工件信息.安裝在機器人末端執行器上的超聲波傳感器由發射和接收探頭構成,根據聲波反射的原理,檢測由待測點反射回的聲波信號,經處理后得到工件的深度信息. 為了提高檢測精度,在接收單元電路中,采用了可變閾值檢測、峰值檢測、溫度補償和相位補償等技術[1 ] ,可獲得較高的檢測精度.對視場中兩個外形完全相同、高度相差0. 1 mm的柱形工件,采用本文提出的融合圖像和深度信息的方法,可準確識別與抓取.
4 實驗結果及結論

評論