三軸加速度傳感器在智能車控制與道路識別中的應用(二)


圖八 裝載于靜止小車上時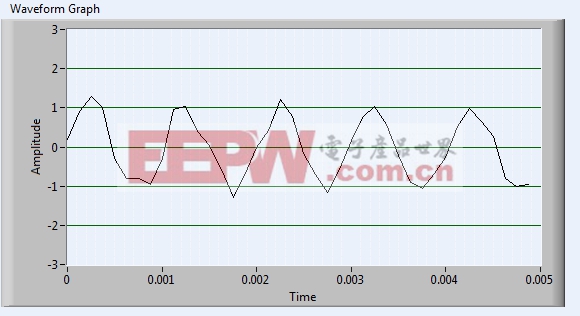
圖九 裝載于運動狀態不變小車上時
圖十 小車角度變化時,加速度傳感器值的變化規律
通過測試可以看出。對于車體角度的變化,加速度傳感器的值都有一定的變化。不過同時也看到車子的振動對加速度傳感器也會產生一些干擾。
在識別坡道時,如果加速度傳感器監控的是豎直方向的加速度,即z方的加速度,那么在平道上時,明顯豎直方向上加速度為零,在上坡后,如果忽略摩擦力,那加速度將變化為gsinθcosθ。通過加速度傳感器中加速度的變化可以容易的辨別出平道和坡道。
2.8數字濾波算法設計
由于加速度傳感器三軸之間差異和較高靈敏度,防止在運動過程中由于智能車的抖動引起的誤差,對單片機采樣得到的電壓值進行歸一化處理,最后可得到各方向傳感器的相對電壓值。具體實現方法:讓智能車后輪轉動起來,分別記錄各傳感器輸出信號的最大值和最小值,用最大值減去最小值得到各傳感器在運動過程中的輸出范圍。在智能車行駛過程中將各方向傳感器輸出的信號值減去最小值,再除以各方向傳感器的輸出范圍即可得到其相對輸出值。根據g1=g2=0,最小值對應著-1.5g,最大值對應著+1.5g。,靜止時各向加速度值為0,加速度范圍為-1.5g一+1.5g。
2.9路徑識別規則
X-T表示智能車前后方向加速度信號,Y-OUT表示智能車左右方向加速度信號,Z-T表示智能車上下方向加速度信號.采樣值經過數字濾波,由于智能車的底盤不可能保持絕對水平,車身可能會向前傾斜或者向后傾斜,
所以,Y-OUT,X-OUT,Z-OUT值都有5%的誤差,當處于勻速直線運動時,采樣值在100~110之間波動。通過加權平均近似為105,125對應+1.5g, 80對應-1.5g。
3 結束語
MMA 7260Q是一種電容式加速度傳感器,融合了信號調理,單極低通濾波和溫度補償技術。成本低,功耗低,測試中加速度信號穩定性與靈敏度都達到了預期的效果,從而提高了系統的控制精度,使舵機響應速度變快。
基于三軸加速度傳感器在智能車的控制與路徑識別的設計,相比傳統的路徑識別具有數據處理簡單,控制精度高的特點,使舵機響應變快。可以廣泛應用與無人駕駛智能車,智能儀表,機器人等高端技術領域。
作者:趙小平、程志江、張永瑞、段志尚












評論