理解ADC誤差對(duì)系統(tǒng)性能的影響(一)

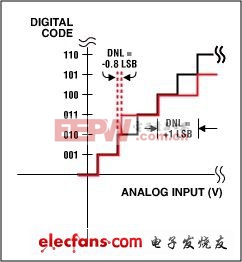
圖1a. DNL誤差:沒有丟碼。
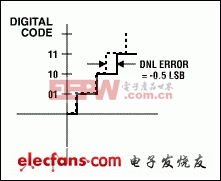
圖1b. DNL誤差:沒有丟碼。
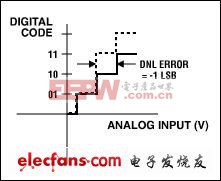
圖1c. DNL誤差:丟失10碼。
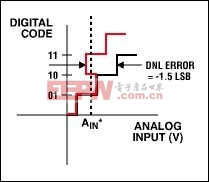
圖1d. DNL誤差:AIN*數(shù)字輸入是三種可能數(shù)值之一,掃描到輸入電壓時(shí),10碼將會(huì)丟失。
隨著DNL誤差值的偏移(也就是說-1LSB,+2LSB),ADC轉(zhuǎn)換函數(shù)會(huì)發(fā)生變化。偏移了的DNL值理論上仍然可以沒有丟碼。關(guān)鍵是要以-1LSB作為底限。值得注意的是DNL在一個(gè)方向上進(jìn)行測(cè)量,通常是沿著轉(zhuǎn)換函數(shù)向上走。將造成碼[N]跳變所需的輸入電壓值和碼[N+1]時(shí)相比較。如果相差為1LSB,DNL誤差就為零。如果大于1LSB,則DNL誤差為正值;如果小于1LSB,DNL誤差則為負(fù)值。
有丟碼并非一定是壞事。如果你只需要13位分辨率,同時(shí)你有兩種選擇,一個(gè)是DNL指標(biāo)≤ ±4LSB的16位ADC (相當(dāng)于無丟碼的14位),價(jià)格為5美元,另一個(gè)是DNL ≤ ±1LSB的16位ADC,價(jià)格為15美元,這時(shí)候,購(gòu)買一個(gè)低等級(jí)的ADC將大幅度地節(jié)省你的元件成本,同時(shí)又滿足了你的系統(tǒng)要求。
積分非線性
積分非線性(INL)定義為DNL誤差的積分,因此較好的INL指標(biāo)意味著較好的DNL。INL誤差告訴設(shè)計(jì)者轉(zhuǎn)換器測(cè)量結(jié)果距離理想轉(zhuǎn)換函數(shù)值有多遠(yuǎn)。繼續(xù)我們的舉例,對(duì)于一個(gè)12位系統(tǒng)來講,±2LSB的INL誤差相當(dāng)于2/4096或0.05%的最大非線性誤差(這已占去ADC誤差預(yù)算的2/3)。因此,有必要選用一個(gè)1LSB (或更好)的器件。對(duì)于±1LSB的INL誤差,等效精度為0.0244%,占ADC誤差預(yù)算的32.5%。對(duì)于0.5LSB的指標(biāo),精度為0.012%,僅占ADC誤差預(yù)算的16% (0.0125%/0.075%)。需要注意的是,無論是INL或DNL帶來的誤差,都不太容易校準(zhǔn)或修正。
失調(diào)和增益誤差
失調(diào)和增益誤差很容易利用微控制器(μC)或數(shù)字信號(hào)處理器(DSP)修正過來。就失調(diào)誤差來講,如果轉(zhuǎn)換器允許雙極性輸入信號(hào)的話,操作將非常簡(jiǎn)單。對(duì)于雙極性系統(tǒng),失調(diào)誤差只是平移了轉(zhuǎn)換函數(shù),但沒有減少可用編碼的數(shù)量(圖2)。有兩套方法可以使雙極性誤差歸零。其一,你可以將轉(zhuǎn)換函數(shù)的x或y軸平移,使負(fù)滿度點(diǎn)與單極性系統(tǒng)的零點(diǎn)相對(duì)準(zhǔn)(圖3a)。利用這種方法,可以簡(jiǎn)單地消除失調(diào)誤差,然后,通過圍繞“新”零點(diǎn)旋轉(zhuǎn)轉(zhuǎn)換函數(shù)可以對(duì)增益誤差進(jìn)行調(diào)節(jié)。第二種技術(shù)采用了一種迭代法。首先給ADC輸入施加一個(gè)0V電壓并執(zhí)行一次轉(zhuǎn)換;轉(zhuǎn)換結(jié)果反映了雙極性零點(diǎn)失調(diào)誤差。然后,通過圍繞負(fù)滿度點(diǎn)旋轉(zhuǎn)轉(zhuǎn)換曲線實(shí)現(xiàn)增益調(diào)節(jié)(圖3b)。注意此時(shí)轉(zhuǎn)換函數(shù)已繞A點(diǎn)轉(zhuǎn)過一定角度,使零點(diǎn)偏離了期望的轉(zhuǎn)換函數(shù)。因此還需要進(jìn)一步的失調(diào)誤差校正。
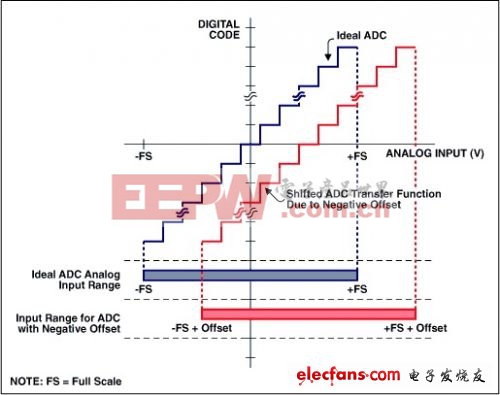
圖2. 雙極性系統(tǒng)的失調(diào)誤差





評(píng)論