基于MSP430單片機(jī)的光電跟蹤伺服系統(tǒng)研究方案

2.2 機(jī)械模擬機(jī)構(gòu)實(shí)驗(yàn)設(shè)計(jì)原理
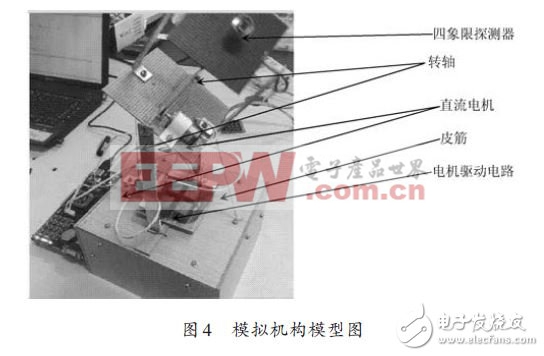
模擬機(jī)構(gòu)設(shè)計(jì)靈感源于地動(dòng)儀的設(shè)計(jì)原理,采用兩個(gè)不同的軸來調(diào)節(jié)兩個(gè)不同但相關(guān)的平面實(shí)現(xiàn)四象限探測(cè)器的大范圍搜尋目標(biāo)的目的,模型圖如圖4所示。
其中下平板主要用于帶動(dòng)上平板實(shí)現(xiàn)大范圍搜尋目標(biāo),上平板及其配置設(shè)備實(shí)現(xiàn)精確定位和跟蹤功能。研究中利用皮筋的彈性以及牽引絲線柔軟且形變相對(duì)較小的優(yōu)勢(shì),實(shí)現(xiàn)搜索平面的任意角度轉(zhuǎn)動(dòng)。并利用廢棄的中心筆管代替齒輪實(shí)現(xiàn)軸的小摩擦先轉(zhuǎn)動(dòng)。使得模型輕小便捷,制作簡(jiǎn)單方便,并且變廢為寶。
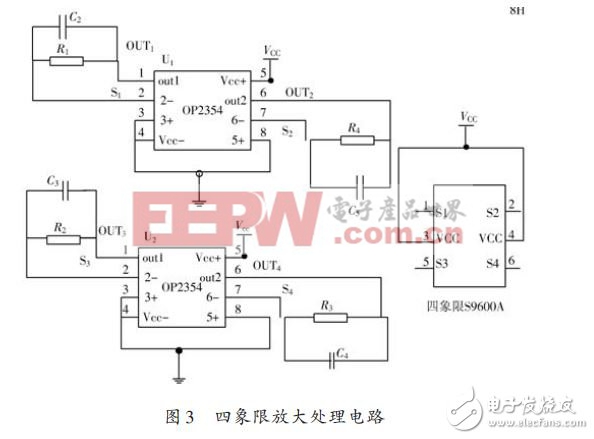
四象限放大處理電路如圖3所示。
3 軟件編程
軟件編程部分主要包括目標(biāo)的粗搜尋和目標(biāo)的精定位及跟蹤兩個(gè)部分。編程中載入自動(dòng)搜索程序搜尋目標(biāo)光源,對(duì)目標(biāo)進(jìn)行三維維的空間片區(qū)性搜索,并載入判別搜到目標(biāo)程序,具體通過A/D采集到的電壓范圍判別是否搜到目標(biāo)。目標(biāo)一旦搜到,即載入坐標(biāo)運(yùn)算程序,計(jì)算當(dāng)前四象限面板與目標(biāo)位置的歸一化坐標(biāo)差值,進(jìn)而調(diào)用PID 算法程序,將PID 的調(diào)節(jié)量轉(zhuǎn)化為PWM 波的輸出持續(xù)時(shí)間和占空比,通過調(diào)用控制電機(jī)轉(zhuǎn)動(dòng)圈數(shù)程序?qū)δ繕?biāo)進(jìn)行追蹤。通道誤差計(jì)算程序如圖5所示。

4 PID控制算法設(shè)計(jì)
PID 算法主要有位置式算法和增量式算法兩類。
一般增量式算法適用于控制精度要求不高的系統(tǒng)中,位置式適用于控制精度要求較高的控制系統(tǒng)中。
由于位置式控制算法會(huì)出現(xiàn)積分飽和問題。工程中通常采用的消除積分飽和問題的方法有限制PI調(diào)節(jié)器輸出的方法、積分分離法和欲限削弱積分法。由于限制PI調(diào)節(jié)器輸出法有可能在正常操作中不能消除系統(tǒng)的余差,而積分法可以在小偏差時(shí)利用積分作用消除偏差。因此本文選用位置式算法的改進(jìn)形式,即積分分離法。
采用的PID控制算法的公式如下式(1)所示:4 PID控制算法設(shè)計(jì)PID 算法主要有位置式算法和增量式算法兩類。
一般增量式算法適用于控制精度要求不高的系統(tǒng)中,位置式適用于控制精度要求較高的控制系統(tǒng)中[4]。











評(píng)論