控制系統的穩定性標準

不太可能有大增益
本文引用地址:http://www.104case.com/article/203172.htm有利的是,當今電子電路中不太可能出現35 dB的增益變化。以前,在變壓器或伺服系統(servomechanism)采用真空管電路驅動的時候,上電序列期間的準備(warm-up)時間可能引起大的環路增益變化。因此,增益規定有必要排斥可能存在穩定性風險的第二個點。此總相位滯后達-180°的頻率處的環路增益曲線上可見這增益余量,在圖3中被標記為GM。在當今電子電路中,高于10 dB的增益余量通常就足夠了,除非您的環路增益對外部參數極為敏感。
增益漂移的另一個示例如圖5所示。圖中顯示另一個被補償的轉換器在10 kHz時出現80°的相位余量。根據前文的討論,我們知道可能會出現增益變化,致使增益曲線上揚或下走。在我們的示例中,我們可以發現2 kHz附近一個區域的相位余量小到只有18°。如果出現20至25 dB的增益下降,你最后得到的控制系統就會出現相當危險的約2 kHz的低相位余量。這就會導致振蕩響應,很可能超出過沖規范。此類系統被認為是有條件穩定。有利的是,如前所述,25 dB的增益變化并不常見,有這等增益余量的系統可被視為強健。然而,我看見過在一些設計案例中,最終使用者(您的客戶)在規范中清晰標明不接受有條件的設計,要求在低于交越頻率的所有點提供大于60°的相位余量。在這種情況下,就強制要求補償轉換器,使得無論什么工作條件下,低于交越頻率時都不存在相位余量降低的區域。

穩定,或是不穩定?
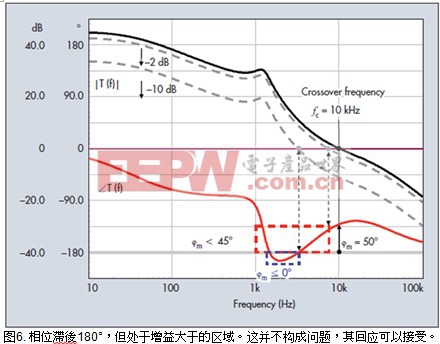
通常認為,在交越前相位下降至低于-180°的系統是不穩定的系統。這樣的響應如圖6所示。在1 kHz后相位曲線快速下降,并在1.5 kHz之后的數kHz范圍內越過-180°的極限。然后相位曲線又上揚,在10 kHz時提供50°的相位余量。是的,此系統很穩定,只不過是因為在0 dB時我們不滿足方程式(7)。要記住的是,要消除方程式(3)的分母,您必須使增益大小恰好等于1且相位滯后180°或更多。在圖中,我們可以看到任何點都不滿足此條件。然而,值得一提的是,此環路極具條件相關性。如果增益減少數dB,您的相位余量將變得低于45°。增益再下降10 dB,您將進入相位余量為0的危險區,這時會達到振蕩條件。








評論