空間機器人中央計算機的雙機熱備份

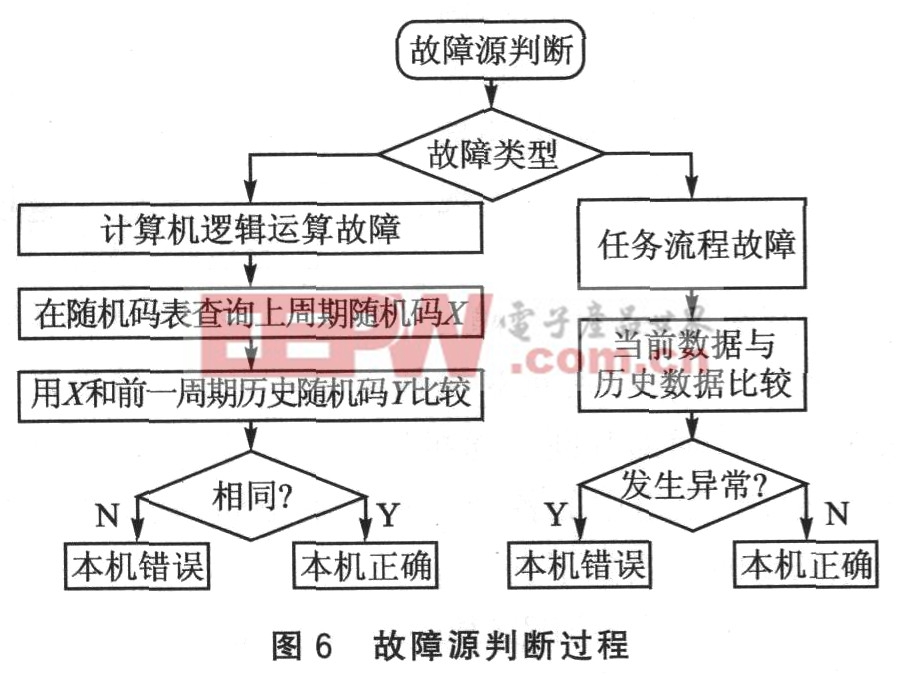
情況1,若系統出現計算機邏輯運算故障,則查詢上一周期同步數據隨機碼,且與上一周期保存的歷史數據隨機碼相比較,并根據比較結果進行切換。
情況2,若系統出現流程故障,則將當前系統同步數據中的任務號、階段號和周期號與自身歷史數據進行比較。根據任務號、階段號、周期號是遞增并且不會發生突變這一原則進行判斷,確定故障源,如圖6所示。本文引用地址:http://www.104case.com/article/202654.htm
(3)雙機控制數據故障
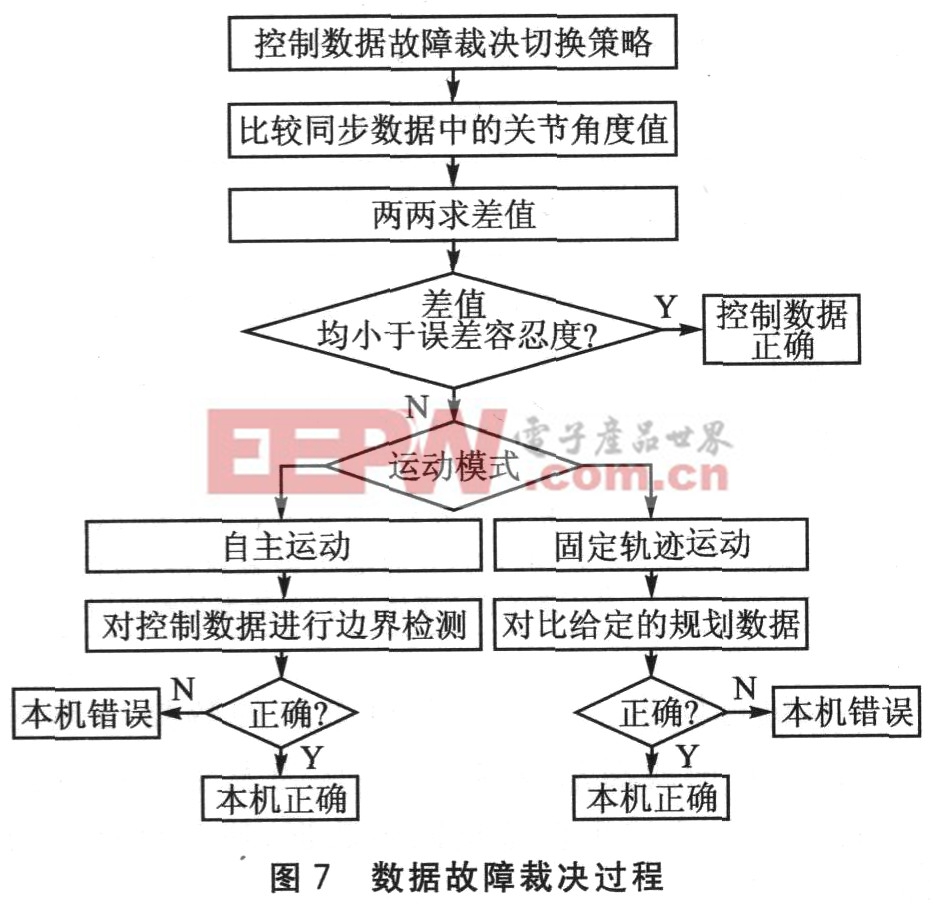
裁決邏輯:空間機器人的運動一般分為兩種模式,一種是預先規劃固定軌跡的運動,另一種是相對于目標的自主運動。主備雙機根據機器人不同的運動狀態,比較同步數據中的控制關節角度,配合誤差容忍度給出系統控制數據故障信號。
故障源判斷:在固定規劃軌跡的模式下,控制數據預先給定,可以將雙機數據與正確數據對比,確定故障源;在自主運動模式下,關節的速度和位移是平滑變化的,不可能發生突變,可以利用關節的最大角速度、最大角加速度、末端的最大速度和最大加速度等邊界值對當前數據進行邊界檢測,從而判斷出故障源,如圖7所示。
另外,當雙機系統對故障源的判斷發生矛盾時,將交由外部指令系統對其進行處理。
2.4 系統恢復
為保證空間機器人中央控制計算機能夠長期、穩定地運行,就需要使其具有從故障狀態恢復的能力。根據其故障原因,分3種情況進行制定:
①系統裁定備機故障,主機正常,此時主機切換為單機模式繼續正常執行任務,備機復位重啟并通知主機,主機切換到雙機同步模式,備機重新與主機同步,恢復系統正常運行。
②系統裁定主機故障,備機正常,此時主機讓權,進行切換,備機得權后變為主機,并切換到單機模式繼續執行系統任務;而主機讓權后變為備機,復位重啟后與主機重新進行同步,恢復系統的正常運行。
③系統失步,即備機周期超前或滯后于主機,這種情況并不是造成系統故障,不進行切換動作。此時主機依然正常執行系統任務,備機利用主機的同步數據更新自身狀態,與主機進行再同步。
3 雙機熱備份系統軟件設計
基于中央控制計算機雙機熱備份系統的硬件環境和策略的制定,將其軟件設計為6個模塊,并基于強實時性操作系統VxWorks進行實現。該操作系統提供的分布消息隊列機制支持系統軟件的容錯設計,其強實時性也滿足空間機器人任務的要求。首先,根據策略的制定,設計心跳任務、同步任務、故障裁決任務和系統恢復任務,另外根據雙機通信的需要設計RS485總線發送任務和RS485總線接收任務。它們的功能如下:
①心跳任務,任務名HeartBeat。周期性地檢測對方機發送的心跳信號,若發現無心跳信號,則通知故障裁決任務進行故障裁決。
②同步任務,任務名Synchronize。根據同步策略中的初始化同步過程進行系統時鐘和任務的初始化同步,并周期性地監視系統同步數據。若發現系統同步數據異常,則通知故障裁決任務進行系統故障的裁決。
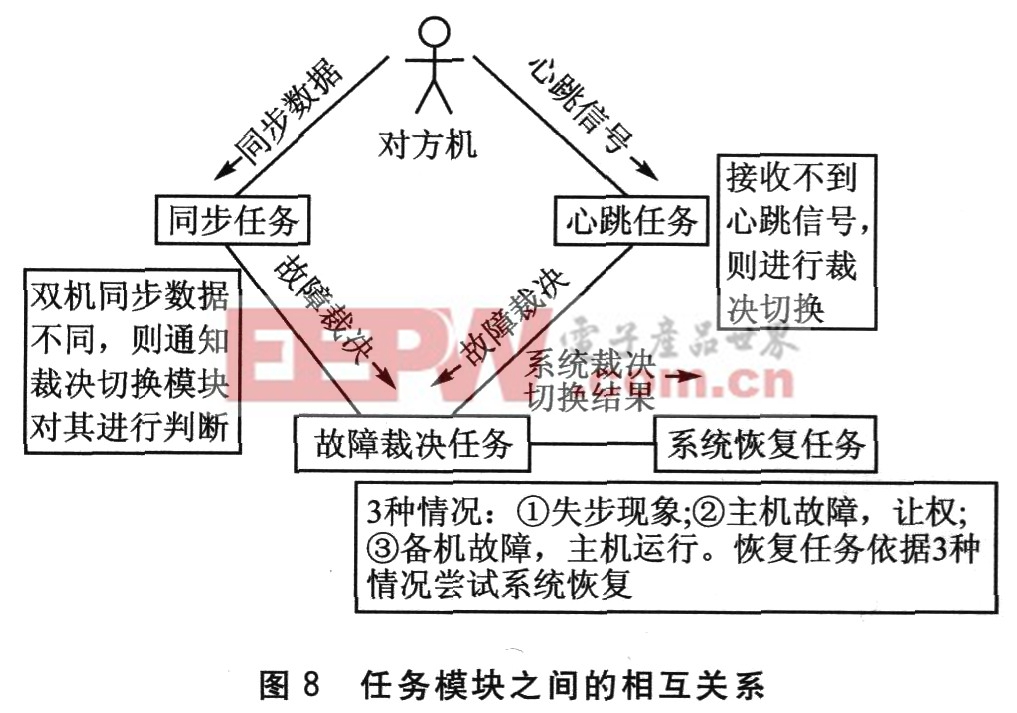
③故障裁決任務,任務名ExecSwitch。根據不同的故障情況,依據前面敘述的裁決過程對系統故障源進行判斷,并根據結果進行切換操作,保障系統正常運行。另外,通知系統恢復任務并嘗試對系統進行恢復。
④系統恢復任務,任務名Reconfigure。根據系統恢復策略嘗試對故障機進行恢復,出現“失步”現象時,依據再同步過程對備機進行再同步。
它們之間的協作關系如圖8所示。
⑤RS485總線接收及發送任務,任務名Receive485、Send485。負責雙機的通信,主要包括控制消息的解析,同步數據的接收與發送。
在RS485總線通信任務中,通信數據格式定義如下:
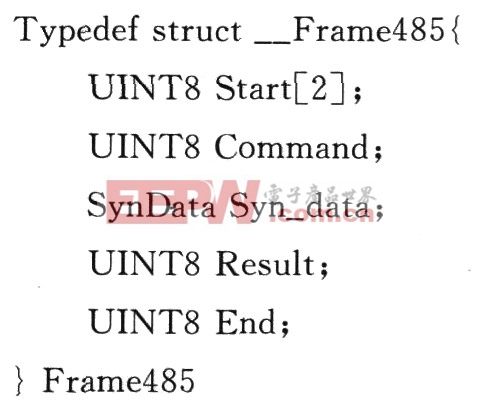
其中,為RS485通信數據加入起始Start和結尾End位,保證RS485通信任務傳遞數據的正確性;Command為雙機熱備份系統的控制命令,如同步系統時鐘指令、任務同步指令等;Syn_data為雙機同步數據,它的數據結構定義如下:
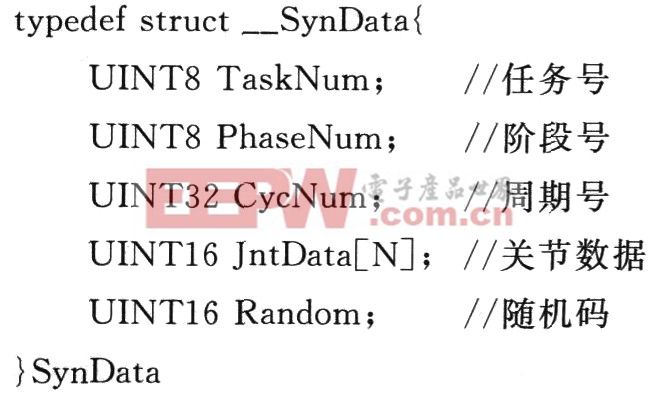
其中,關節數據以double類型計算,但在雙機通信中轉化為16位整數進行傳遞,節省數據流量;Result為裁決結果,雙機將比較裁決結果。如果一致則進行相應處理,如果矛盾將由指令系統進行處理。
雙機熱備份系統的軟件由以上6個模塊組成,對系統進行監測、裁決、恢復,保證中央控制計算機長期、穩定地運行。
4 雙機熱備份系統驗證
當中央控制計算機啟動后,主機將向備機發出同步系統周期指令,同步系統周期時間;在外部指令系統啟動主機任務的同時,主機將發出指令啟動備機任務。主機從接收指令到備機同步啟動任務所需時間為1 420 ms,備機從接收指令到啟動任務所需時間為1180 ms。該雙機系統可以快速啟動并進行同步。
在運行過程中,利用錯誤注入的測試方法,預先在程序中注入錯誤,系統檢測到錯誤后,能夠快速的切換,并且備機可以及時更新系統數據,與主機進行再同步,從切換完成到重新同步的平均時間為592 ms內,滿足空間機器人任務的強實時性要求。
結 語
本研究在綜合考慮空間環境及機器人任務特殊性的基礎上,實現了一種獨特的雙機熱備份系統。依據可能出現的故障類型,設計了心跳策略、同步策略、裁決切換策略和恢復策略,并基于VxWorks操作系統實現了雙機熱備份系統的軟件。經驗證,該系統具有較好容錯能力,可增強空間機器人系統在復雜空間環境下執行任務的可靠性,適合在空間機器人系統中應用。





評論