空間機(jī)器人中央計(jì)算機(jī)的雙機(jī)熱備份
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
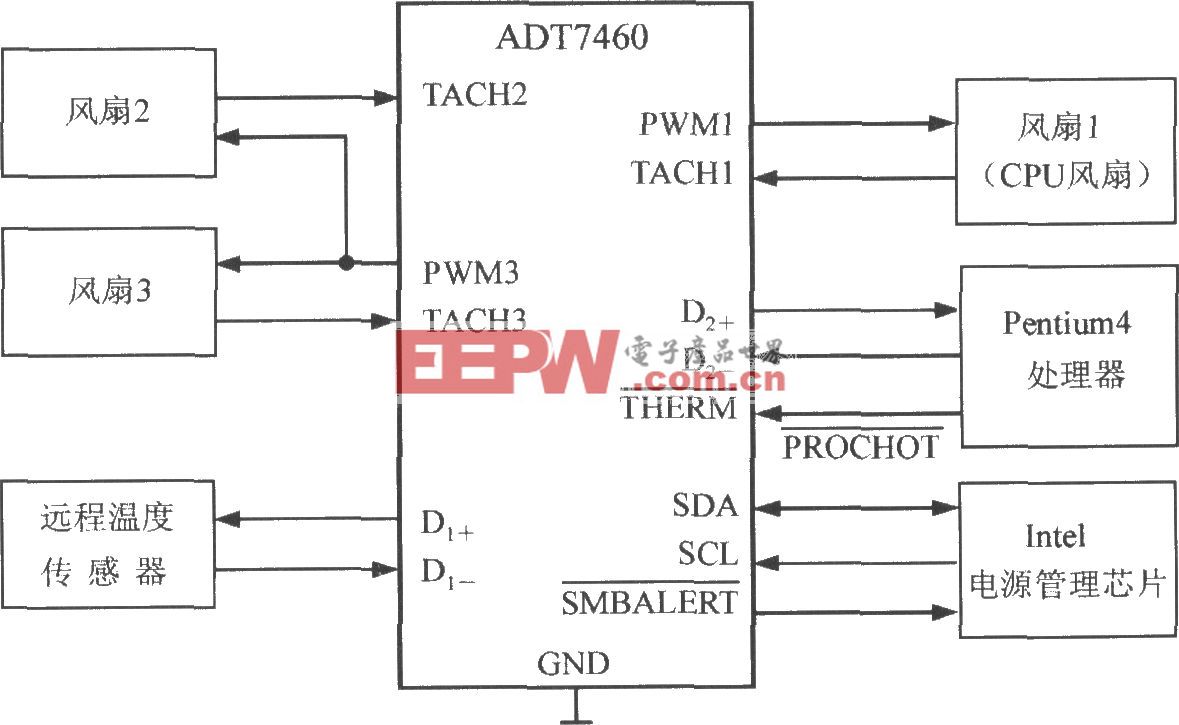
考慮到空間機(jī)器人中央控制計(jì)算機(jī)的雙機(jī)熱備份系統(tǒng)的特殊性,所構(gòu)建的硬件平臺(tái)如圖1所示。
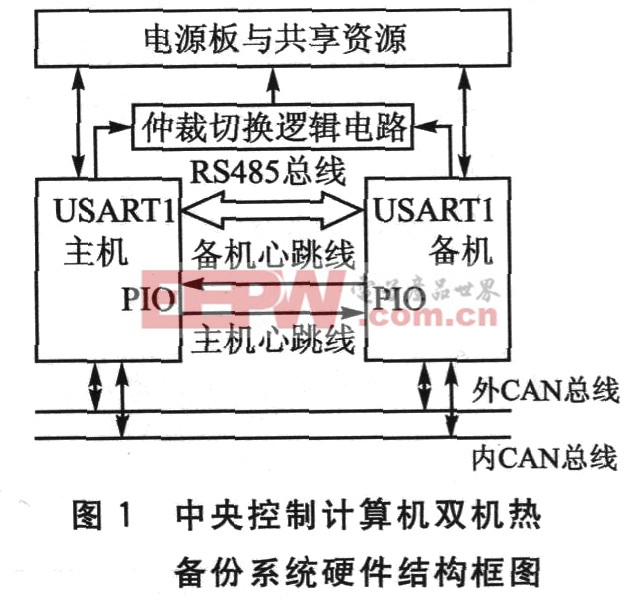
互為備份的中央控制計(jì)算機(jī)采用完全相同的設(shè)計(jì),通過(guò)內(nèi)部和外部的CAN總線與控制模塊和指令系統(tǒng)分別相連。熱備份時(shí),主、備機(jī)從CAN總線上同時(shí)接收數(shù)據(jù),但只有主機(jī)可以通過(guò)CAN總線向外部輸出指令及控制數(shù)據(jù)。
主備機(jī)之間通過(guò)RS485總線相連,實(shí)現(xiàn)雙機(jī)之間數(shù)據(jù)監(jiān)測(cè)和同步等功能。在主機(jī)和備機(jī)的PIO口分別引出一條心跳線,定時(shí)發(fā)出脈沖信號(hào),用來(lái)檢查判斷對(duì)方機(jī)是否具備基本運(yùn)行能力。雙機(jī)進(jìn)行切換時(shí),通過(guò)仲裁邏輯電路改變雙機(jī)系統(tǒng)的當(dāng)班權(quán),完成系統(tǒng)的切換操作。
2 雙機(jī)熱備份策略
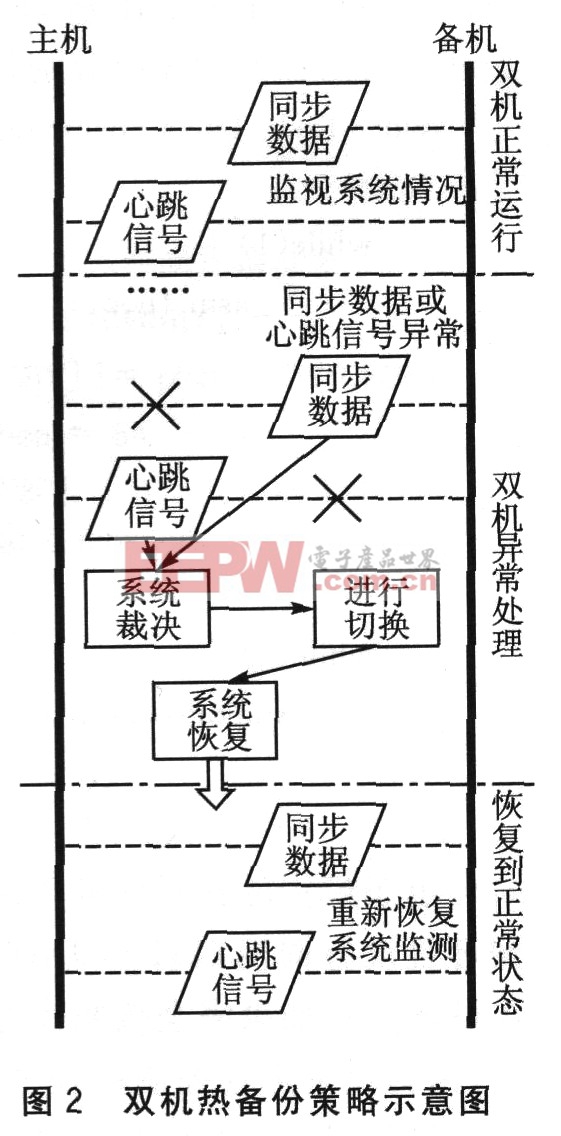
為保證空間機(jī)器人系統(tǒng)正常、穩(wěn)定地運(yùn)行,根據(jù)空間機(jī)器人中央控制計(jì)算機(jī)雙機(jī)熱備份系統(tǒng)的特點(diǎn),主備雙機(jī)需要根據(jù)系統(tǒng)的同步數(shù)據(jù)和心跳信號(hào)對(duì)對(duì)方機(jī)的運(yùn)行情況進(jìn)行監(jiān)測(cè),保持主備雙機(jī)同步運(yùn)行。當(dāng)系統(tǒng)發(fā)生故障時(shí)利用系統(tǒng)同步數(shù)據(jù)和心跳信號(hào),定位系統(tǒng)發(fā)生的故障,并對(duì)故障源進(jìn)行判斷,完成切換。在切換后,系統(tǒng)將嘗試恢復(fù)故障,整個(gè)策略示意如圖2所示。
2.1 心跳信號(hào)
心跳信號(hào)是該中央控制計(jì)算機(jī)運(yùn)行時(shí)發(fā)送的周期性脈沖信號(hào),是中央控制計(jì)算機(jī)正常運(yùn)行的判斷依據(jù)。
主備雙機(jī)可以通過(guò)對(duì)對(duì)方機(jī)心跳信號(hào)的監(jiān)測(cè),來(lái)判斷對(duì)方機(jī)是否正常運(yùn)行,同時(shí)心跳信號(hào)也是裁決故障時(shí)的一種輔助判據(jù)。當(dāng)發(fā)現(xiàn)備機(jī)無(wú)心跳信號(hào)時(shí),主機(jī)切換到單機(jī)模式,備機(jī)由外部指令系統(tǒng)進(jìn)行處理;當(dāng)發(fā)現(xiàn)主機(jī)無(wú)心跳信號(hào)時(shí),備機(jī)獲得當(dāng)班權(quán)變?yōu)橹鳈C(jī)并進(jìn)行輸出,主機(jī)交由外部指令系統(tǒng)處理。
2.2 同步監(jiān)測(cè)
雙機(jī)同步是雙機(jī)熱備份系統(tǒng)能夠正常進(jìn)行系統(tǒng)監(jiān)測(cè),對(duì)故障進(jìn)行正確判斷的基礎(chǔ)。正確的同步策略是雙機(jī)系統(tǒng)能夠及時(shí)檢測(cè)出軟件故障并執(zhí)行正確切換動(dòng)作的前提,也是保證系統(tǒng)在故障發(fā)生之后成功恢復(fù)的關(guān)鍵要素。
為了保證雙機(jī)能夠長(zhǎng)期、穩(wěn)定地處于同步之中,維持系統(tǒng)正常運(yùn)行,制定4項(xiàng)關(guān)鍵同步方法。
①雙機(jī)時(shí)鐘周期同步。當(dāng)主備雙機(jī)上電后,在主機(jī)啟動(dòng)周期定時(shí)器的同時(shí),應(yīng)同時(shí)向備機(jī)發(fā)出消息,通知備機(jī)啟動(dòng)周期定時(shí)器。由于空間機(jī)器人系統(tǒng)以生命周期為單位執(zhí)行任務(wù),所以生命周期的同步是整個(gè)系統(tǒng)保持同步的基礎(chǔ)。若該操作失敗,必須重新進(jìn)行周期定時(shí)器的同步。
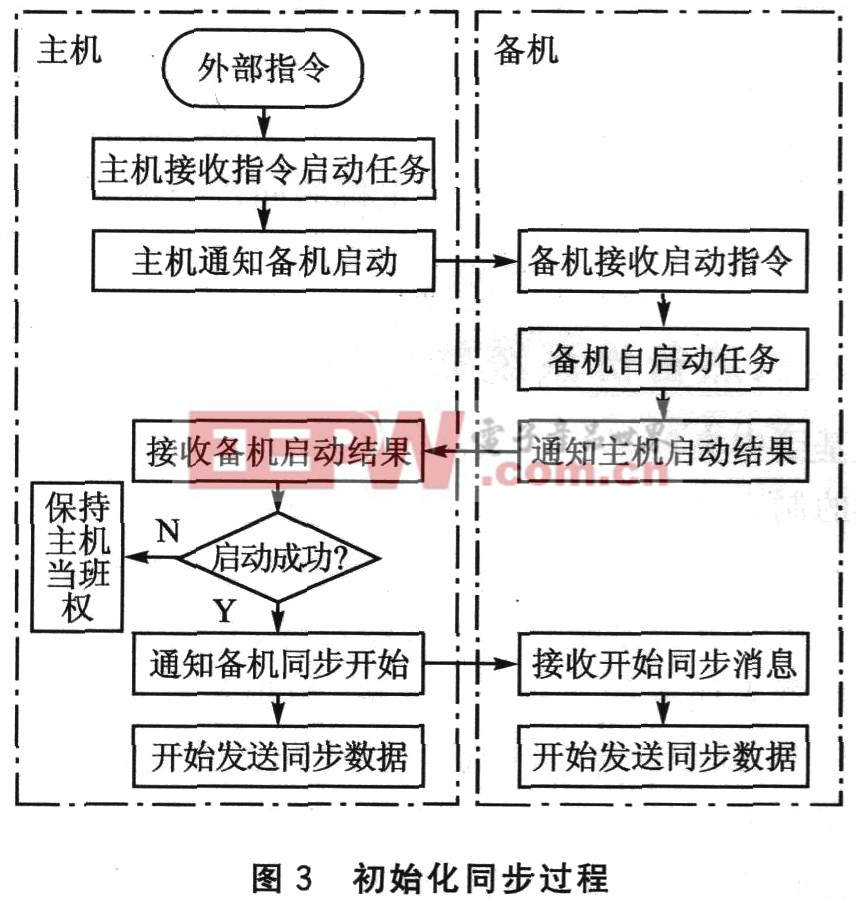
②雙機(jī)任務(wù)初始化同步。為保證主備雙機(jī)任務(wù)在同一時(shí)間啟動(dòng),應(yīng)在任務(wù)啟動(dòng)指令傳遞到主機(jī)時(shí),由主機(jī)向備機(jī)發(fā)出指令,啟動(dòng)備機(jī)任務(wù),使備機(jī)進(jìn)人工作模式,其具體步驟如圖3所示。
③雙機(jī)同步數(shù)據(jù)的實(shí)時(shí)監(jiān)測(cè)。機(jī)器人執(zhí)行任務(wù)期間,主備雙機(jī)將在每個(gè)系統(tǒng)生命周期的開(kāi)始向?qū)Ψ綑C(jī)發(fā)送同步數(shù)據(jù),并將收到的數(shù)據(jù)與自身數(shù)據(jù)進(jìn)行比對(duì),完成對(duì)系統(tǒng)同步數(shù)據(jù)的實(shí)時(shí)監(jiān)測(cè)。
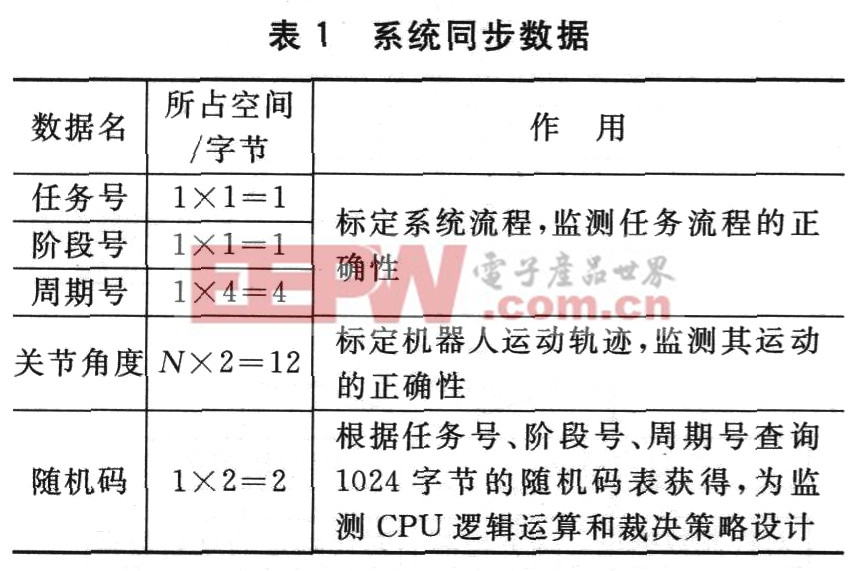
為保證對(duì)系統(tǒng)監(jiān)測(cè)的全面性和判斷故障的準(zhǔn)確性,提取任務(wù)號(hào)、任務(wù)階段號(hào)、系統(tǒng)周期、實(shí)際關(guān)節(jié)角度以及一個(gè)隨機(jī)碼作為系統(tǒng)的同步數(shù)據(jù),如表1所列。
④雙機(jī)再同步。當(dāng)發(fā)現(xiàn)雙機(jī)系統(tǒng)的數(shù)據(jù)出現(xiàn)兩個(gè)周期以?xún)?nèi)的超前或滯后現(xiàn)象時(shí),不認(rèn)為發(fā)生系統(tǒng)故障而進(jìn)行切換,而是直接更新備機(jī)同步數(shù)據(jù),使備機(jī)重新與主機(jī)同步。
2.3 裁決邏輯
裁決是雙機(jī)熱備份系統(tǒng)中至關(guān)重要的一個(gè)環(huán)節(jié)。誘發(fā)空間機(jī)器人系統(tǒng)出現(xiàn)故障的原因很多,在其工作的空間環(huán)境中存在著大量高能粒子,極易使中央控制計(jì)算機(jī)電位發(fā)生反轉(zhuǎn)造成系統(tǒng)失常。通信線路的故障和隨機(jī)產(chǎn)生的誤碼率也很容易造成系統(tǒng)失常。通過(guò)分析總結(jié),空間機(jī)器人系統(tǒng)最易出現(xiàn)3種故障類(lèi)型,即雙機(jī)通信線路故障、系統(tǒng)任務(wù)流程故障和系統(tǒng)控制數(shù)據(jù)故障。為保證雙機(jī)熱備份系統(tǒng)及時(shí)、準(zhǔn)確地檢測(cè)故障,判斷故障源,做出正確的切換動(dòng)作,分別為3種故障制定相應(yīng)的故障裁決邏輯。
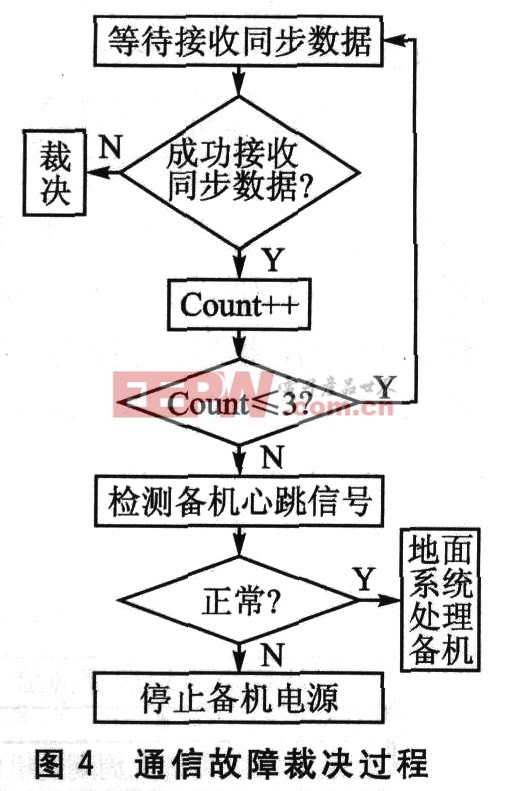
(1)雙機(jī)通信線路故障
裁決邏輯:當(dāng)RS485接收模塊連續(xù)3周期沒(méi)有接收到對(duì)方的同步數(shù)據(jù)時(shí),給出故障信號(hào)。為避免計(jì)算機(jī)重復(fù)進(jìn)行裁決判斷,停止同步數(shù)據(jù)發(fā)送,同時(shí)檢測(cè)備機(jī)心跳信號(hào)。若備機(jī)心跳信號(hào)停止,則由主機(jī)主動(dòng)停止備機(jī)電源;若對(duì)方心跳信號(hào)正常,則由外部指令決定備機(jī)狀態(tài)。其實(shí)現(xiàn)流程如圖4所示。
(2)雙機(jī)任務(wù)流程故障
為有效、準(zhǔn)確地判斷雙機(jī)任務(wù)流程故障,借助隨機(jī)碼表來(lái)對(duì)其進(jìn)行輔助判斷。隨機(jī)碼表是一個(gè)32×16的二維short型數(shù)組,數(shù)組中的各個(gè)元素互不相同,查詢(xún)生成同步數(shù)據(jù)隨機(jī)碼的公式如下:

式中X為隨機(jī)碼表行號(hào),Y為隨機(jī)碼表列號(hào),TaskID為任務(wù)號(hào),PhaseNum為任務(wù)階段號(hào),ClcNum為任務(wù)周期號(hào)。
主備雙機(jī)存儲(chǔ)同一份隨機(jī)碼表,利用上述公式確定每周期的隨機(jī)碼作為同步數(shù)據(jù),發(fā)送給對(duì)方機(jī)。這樣做大大簡(jiǎn)化了裁決邏輯,也可檢測(cè)出CPU邏輯運(yùn)算單元的錯(cuò)誤。
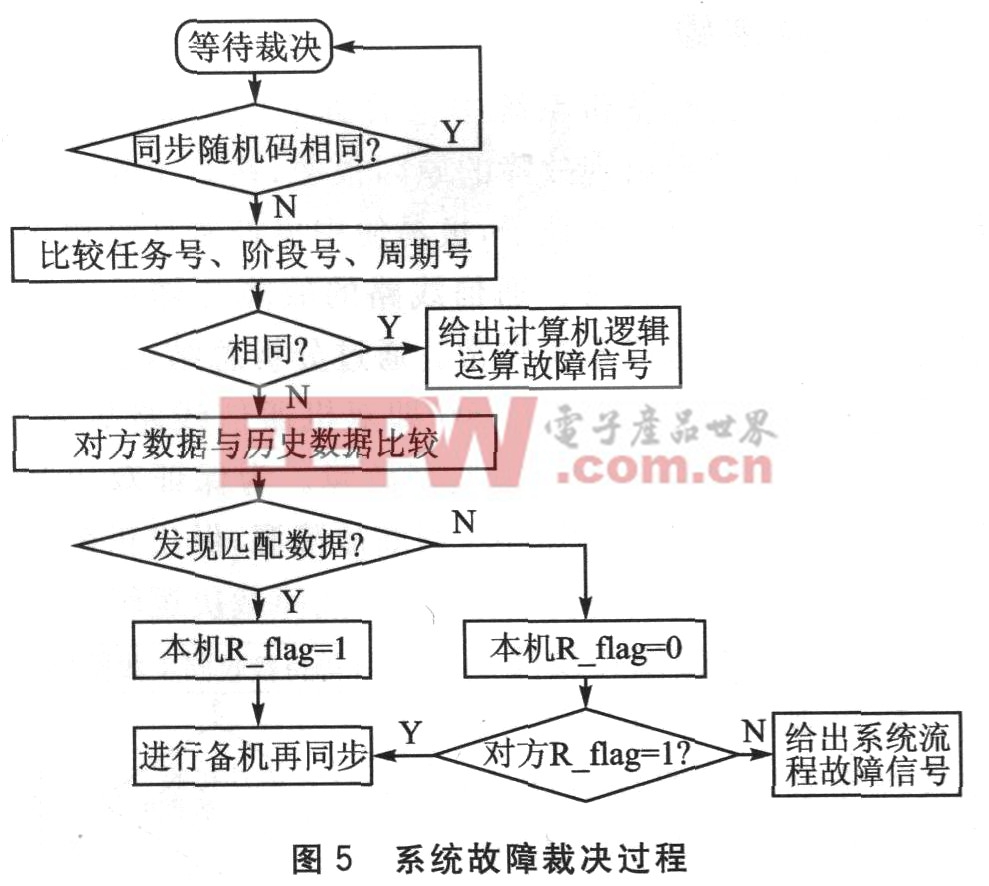
裁決邏輯:主備機(jī)首先比較同步數(shù)據(jù)中隨機(jī)碼,若隨機(jī)碼不同,則進(jìn)一步比較任務(wù)號(hào)、階段號(hào)、周期號(hào)。若比較結(jié)果相同,則給出計(jì)算機(jī)邏輯運(yùn)算故障信號(hào);若不同,將對(duì)方同步數(shù)據(jù)與己方前后兩周期數(shù)據(jù)比較。若發(fā)現(xiàn)匹配數(shù)據(jù),進(jìn)行備機(jī)與主機(jī)再同步;若失敗,給出任務(wù)流程故障信號(hào)。其實(shí)現(xiàn)程序流程如圖5所示。





評(píng)論