由薄膜致動器驅動的微型機器人可以變形、鎖定形狀并不受束縛地運行

清華大學的機器人專家團隊與來自北京航空航天大學的三位同事合作,設計了一種新型微型機器人,該機器人可以不斷改變其形狀并“鎖定”為特定配置。在他們發表在《自然機器智能》雜志上的論文中,該小組描述了他們設計的因素、微型機器人的功能以及它們的可能用途。
本文引用地址:http://www.104case.com/article/202504/469933.htm新型微型機器人功能的關鍵是該團隊開發的薄膜形狀小型致動器——它是通過在硅晶片上旋轉一層硅膠涂層,然后在基板上轉移印刷聚酰亞胺薄膜制成的。然后,使用電子束蒸發、光刻和銅層的濕法蝕刻添加一層銅。它是用激光切割完成的。
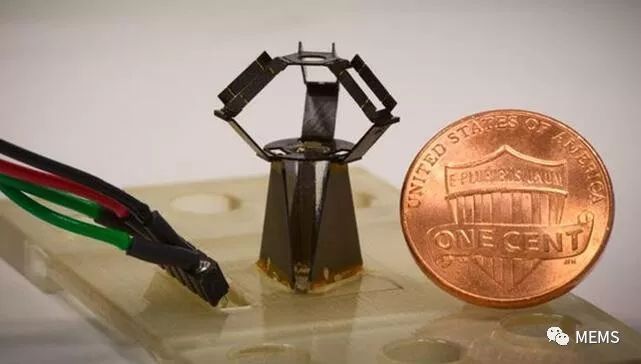
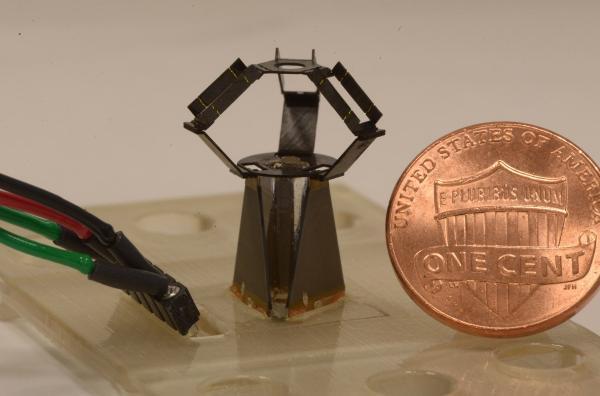
當添加傳感器、電機和類似樂高積木的積木時,該致動器允許構建具有變形能力的微型機器人。結果是一個只有 9 厘米長、重 25 克的機器人。研究人員聲稱,它是可以在陸地或空中運行的最小無繩機器人。
研究人員指出,由此產生的微型機器人可以在沒有系繩的情況下運行,并且可以呈現出各種形狀,從滾動的車輛(可以以高達每秒 1.6 米的速度移動)到飛行的無人機。研究人員甚至構建了一個可以同時做這兩件事的機器。他們指出,這個想法是制造微型機器人,這些機器人可以按需變形,然后鎖定到特定用途所需的配置中。
研究小組表示,使用他們的設計可以構建的微型機器人類型的想法幾乎是無限的,并指出他們已經構建了可以滾動、行走、奔跑、上下跳躍或作為運動方式攀爬和飛行的原型。他們指出,他們的微型機器人在很多方面都與變形金剛電影中看到的機器人相似。
該團隊最后建議他們的機器人可以以多種方式使用,作為玩具,或用于兒童的研究項目。他們指出,也可能有商業應用,包括在昆蟲巢等小型場所進行生物學研究,或者像許多小型機器人一樣,它們可能會用于搜救行動。

輕型地面-航空微型機器人的概念設計和演示 圖片來源 Nature Machine Intelligence



評論