汽車底盤控制技術(shù)的系統(tǒng)綜述與未來發(fā)展

引言
本文引用地址:http://www.104case.com/article/202503/468798.htm汽車底盤控制技術(shù)在確保車輛的穩(wěn)定性、性能和安全性方面發(fā)揮著至關(guān)重要的作用。它包含一系列系統(tǒng)和組件,這些系統(tǒng)和組件協(xié)同工作以管理和優(yōu)化車輛動力學(xué)的各個方面,包括懸架、轉(zhuǎn)向、制動、牽引力和穩(wěn)定性控制。這些系統(tǒng)不僅增強(qiáng)了駕駛體驗(yàn),還有助于預(yù)防事故和提高整體車輛安全性 [1]。隨著自動駕駛技術(shù)的進(jìn)步,自動駕駛功能的實(shí)現(xiàn)依賴于感知層、決策層和執(zhí)行層的協(xié)同配合,因此對將所有控制功能集成在執(zhí)行層的車輛底盤提出了更高的要求。線控底盤將機(jī)械傳動控制升級為線控,滿足了車架級自動駕駛技術(shù)對電信號傳輸?shù)膶?shí)時性、安全冗余性、高性能、智能化的要求。縱觀歷史,底盤控制技術(shù)已經(jīng)發(fā)生了重大發(fā)展。最初,簡單的機(jī)械系統(tǒng)用于提供基本的懸架和轉(zhuǎn)向功能。然而,隨著技術(shù)的進(jìn)步,這些系統(tǒng)的復(fù)雜程度和功能呈指數(shù)級增長。如今,汽車制造商采用各種類型的懸架系統(tǒng),例如獨(dú)立懸架和主動懸架,以提供卓越的乘坐舒適性和控性能 [2]。轉(zhuǎn)向系統(tǒng)是底盤控制技術(shù)的另一個關(guān)鍵組成部分。在現(xiàn)代車輛中,傳統(tǒng)的轉(zhuǎn)向機(jī)構(gòu),如齒輪齒條系統(tǒng),已被電動助力轉(zhuǎn)向 (EPS) 所取代。EPS 提供更高的精度、控制和燃油效率,使其成為現(xiàn)代底盤控制系統(tǒng)不可或缺的一部分 [3]。此外,線控轉(zhuǎn)向技術(shù)越來越受到關(guān)注,實(shí)現(xiàn)了轉(zhuǎn)向的電子控制,進(jìn)一步徹底改變了駕駛體驗(yàn)。制動系統(tǒng)在底盤控制領(lǐng)域的重要性不容忽視。制動系統(tǒng)確保車輛安全減速和停止的能力。傳統(tǒng)上,使用液壓制動系統(tǒng),但已經(jīng)引入了防抱死制動系統(tǒng) (ABS) 和再生制動等進(jìn)步。ABS 可防止車輪在緊急制動情況下抱死,增強(qiáng)控制和穩(wěn)定性。再生制動常見于電動和混合動力汽車中,它將動能轉(zhuǎn)化為電能,從而提高整體效率 [4]。牽引力和穩(wěn)定性控制系統(tǒng)在保持車輛穩(wěn)定性和防止事故方面發(fā)揮著關(guān)鍵作用。牽引力控制系統(tǒng)在加速過程中管理車輪打滑,即使在濕滑的表面上也能確保最大的牽引力。電子穩(wěn)定控制系統(tǒng) (ESC) 結(jié)合了各種傳感器和控制機(jī)制,可自動檢測和糾正橫向打滑或失控 [5]。它是現(xiàn)代車輛中必不可少的安全功能,可顯著降低翻車風(fēng)險。汽車底盤控制技術(shù)包括各種系統(tǒng)和組件,它們協(xié)同工作以提高車輛的性能、穩(wěn)定性和安全性。從懸架和轉(zhuǎn)向到制動和牽引力控制,每個組件在確保平穩(wěn)和安全的駕駛體驗(yàn)方面都發(fā)揮著至關(guān)重要的作用 [6]。隨著技術(shù)的進(jìn)步,這些組件之間的集成和通信變得更加復(fù)雜,預(yù)示著未來會有更多令人興奮的發(fā)展。本文對汽車轉(zhuǎn)向/制動/駕駛/懸架系統(tǒng)進(jìn)行了全面的回顧和討論,分析了它們的系統(tǒng)組成、技術(shù)現(xiàn)狀和關(guān)鍵技術(shù)。首先,它引入了線控系統(tǒng)中的容錯技術(shù),包括硬件冗余和軟件冗余。硬件冗余備份可以提高系統(tǒng)可靠性,而軟件冗余則依賴于控制器中的容錯算法來提高系統(tǒng)冗余度。這兩種類型的冗余技術(shù)具有很強(qiáng)的互補(bǔ)性,這種互補(bǔ)的設(shè)計(jì)保證了系統(tǒng)在面對故障時能夠保持較高的性能水平,大大降低了故障帶來的風(fēng)險,為提高線控系統(tǒng)的穩(wěn)定性和可靠性提供了有力的支持。本文重點(diǎn)介紹線控制動系統(tǒng),并介紹了一種優(yōu)化的制動力分配策略,以確保車輛的安全性和穩(wěn)定性。這種策略不僅提高了制動效率,還增強(qiáng)了車輛的穩(wěn)定性。此外,它還介紹了輪轂電機(jī)驅(qū)動系統(tǒng)在線控驅(qū)動系統(tǒng)中的應(yīng)用。該系統(tǒng)可以靈活地放置在電動汽車的車輪上,具有集成度高、駕駛靈活等優(yōu)點(diǎn)。使用碳硅的電機(jī)控制器技術(shù)適合作為功率半導(dǎo)體材料,雖然目前面臨高成本的挑戰(zhàn),但其優(yōu)異的導(dǎo)熱性和導(dǎo)電性使其在電機(jī)控制系統(tǒng)中具有廣闊的應(yīng)用前景。此外,對于線控懸架系統(tǒng),關(guān)鍵技術(shù)包括被動容錯控制和主動容錯控制。被動容錯控制針對預(yù)定義的故障提前設(shè)計(jì)固定的容錯控制律,實(shí)現(xiàn)時間和成本相對較低。主動容錯系統(tǒng)基于 FDD(故障檢測和診斷),其中診斷單元在系統(tǒng)發(fā)生故障時檢測和診斷故障。然后,控制反饋或前饋控制器獲得適當(dāng)?shù)娜蒎e控制律,以確保閉環(huán)系統(tǒng)的穩(wěn)定性。這兩項(xiàng)技術(shù)的應(yīng)用大大提高了車輛的控性能和乘坐舒適性。然而,線控底盤系統(tǒng)仍然面臨一些挑戰(zhàn)。例如,硬件冗余設(shè)計(jì)和軟件冗余設(shè)計(jì)的成本相對較高,需要在可靠性、成本和性能之間取得平衡。此外,線控轉(zhuǎn)向系統(tǒng)的安全性和可靠性仍有待提高。由于線控制動系統(tǒng)依靠控制器來實(shí)現(xiàn)系統(tǒng)控制,因此控制器可靠性、抗干擾性、容錯性以及多個控制系統(tǒng)通信之間的實(shí)時響應(yīng)等因素都有可能影響制動控制。然而,隨著技術(shù)的不斷發(fā)展,未來的線控底盤技術(shù)有望變得更加成熟和可靠,為汽車行業(yè)的發(fā)展做出更大的貢獻(xiàn)。
2. 汽車線控轉(zhuǎn)向系統(tǒng)
2.1. 最新技術(shù)
如圖 1 所示,汽車轉(zhuǎn)向系統(tǒng)經(jīng)歷了幾個階段,包括機(jī)械轉(zhuǎn)向系統(tǒng)、液壓助力轉(zhuǎn)向 (HPS) 系統(tǒng)、電動液壓助力轉(zhuǎn)向 (EHPS) 系統(tǒng)、電動助力轉(zhuǎn)向 (EPS) 系統(tǒng)和線控轉(zhuǎn)向 (SBW) 系統(tǒng) [7,8]。與 EPS 相比,線控轉(zhuǎn)向系統(tǒng)消除了方向盤和方向盤之間的機(jī)械連接 [9,10,11,12,13,14]。
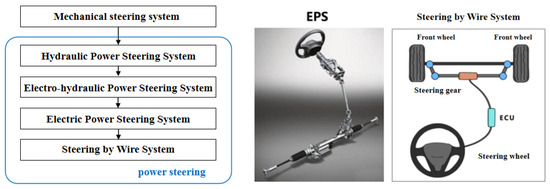
圖 1.(左)汽車轉(zhuǎn)向系統(tǒng)的發(fā)展;(右)線控轉(zhuǎn)向的概念。全球主要汽車制造商和供應(yīng)商都對線控轉(zhuǎn)向系統(tǒng)進(jìn)行了深入研究,TRW (TRW Automotive Holdings Corp)、Delphi 和 ZF 等國際知名供應(yīng)商都制造了用于實(shí)驗(yàn)研究的物理原型。梅賽德斯奔馳、寶馬、通用汽車等國際知名汽車制造商展出了一款采用線控轉(zhuǎn)向系統(tǒng)的概念車。1960 年代后期,德國的 Kasselmann 開始開發(fā)線控轉(zhuǎn)向系統(tǒng)。1990 年代,奔馳開始研究前輪轉(zhuǎn)向,并將線控轉(zhuǎn)向系統(tǒng)應(yīng)用于概念車“F400 Carving”。2000 年,寶馬在概念車“BMW Z22”上應(yīng)用線控轉(zhuǎn)向,轉(zhuǎn)向角減小到 160 度。2013 年,Infinity Q50 應(yīng)用了線控轉(zhuǎn)向技術(shù),其中利用兩個電機(jī)和三個相互監(jiān)控的 ECU 來實(shí)現(xiàn)轉(zhuǎn)向。2017 年,美國施耐德開發(fā)了由“靜音方向盤系統(tǒng)”和“按需轉(zhuǎn)向系統(tǒng)”組成的線控轉(zhuǎn)向系統(tǒng)。目前,我國線控舵系統(tǒng)的研究正逐漸從理論走向?qū)嵺`,并取得了一定的進(jìn)展 [15]。線控轉(zhuǎn)向系統(tǒng)分為三部分:方向盤模塊、轉(zhuǎn)向執(zhí)行模塊和中央控制單元(ECU)[16]。所述方向盤模塊包括方向盤扭矩、角度傳感器、路感電機(jī)及其減速器[17]等部件;轉(zhuǎn)向執(zhí)行模塊包括線性位移傳感器、角度傳感器、轉(zhuǎn)向電機(jī)及其減速機(jī)構(gòu)等部件;此外,線控轉(zhuǎn)向系統(tǒng)還包括轉(zhuǎn)向控制器和電源等組件[18]。所述方向盤模塊(即方向盤)用于接收駕駛員的轉(zhuǎn)向控制;方向盤扭矩傳感器和角度傳感器用于收集駕駛員通過方向盤輸入的扭矩、角度和速度;路感電機(jī)及其減速器為駕駛員提供路感信息,并輸出方向盤的返回扭矩。轉(zhuǎn)向執(zhí)行模塊包括各種傳感器,線性位移傳感器用于采集轉(zhuǎn)向執(zhí)行器的線性位移信號,并將其轉(zhuǎn)換為前輪角度信號;所述角度傳感器用于采集方向盤的角度信息;轉(zhuǎn)向電機(jī)及其減速機(jī)構(gòu)用于克服轉(zhuǎn)向阻力,驅(qū)動轉(zhuǎn)向系統(tǒng)通過相應(yīng)的角度旋轉(zhuǎn);齒輪齒條轉(zhuǎn)向器用于接收和放大轉(zhuǎn)向執(zhí)行器電機(jī)的輸出扭矩,驅(qū)動方向盤轉(zhuǎn)動。轉(zhuǎn)向控制器由多個控制器組成。方向盤模塊控制器從方向盤模塊采集相關(guān)信號,接收目標(biāo)返回扭矩信號,并向道路感應(yīng)電機(jī)發(fā)送控制信號;轉(zhuǎn)向執(zhí)行模塊控制器負(fù)責(zé)從轉(zhuǎn)向執(zhí)行模塊收集相關(guān)信號,接收目標(biāo)方向盤角度信號,并向轉(zhuǎn)向電機(jī)發(fā)送控制信號 [19]。線控轉(zhuǎn)向系統(tǒng)與車輛中的其他電氣設(shè)備共享電池電源。目前,車輛的主流電源是 12V,而 48V 將是未來的發(fā)展趨勢。根據(jù)轉(zhuǎn)向電機(jī)的數(shù)量、布置位置和控制方式,線控轉(zhuǎn)向系統(tǒng)的典型布局可分為五大類,即單電機(jī)-前輪轉(zhuǎn)向、雙電機(jī)-前輪轉(zhuǎn)向、雙電機(jī)獨(dú)立前輪轉(zhuǎn)向、后輪線控轉(zhuǎn)向、四輪獨(dú)立轉(zhuǎn)向。雙電機(jī)前輪轉(zhuǎn)向裝置具有良好的冗余性,單電機(jī)所需的功率更少。英菲尼迪 Q50 采用了這種安排,但這種形式的零件成本增加,冗余算法復(fù)雜。線控轉(zhuǎn)向的工作示意圖如圖 2 所示。當(dāng)駕駛員轉(zhuǎn)動方向盤時,角度位移傳感器將駕駛員的意圖以及車輛的其他信號(例如速度信號)轉(zhuǎn)換為數(shù)字信號。ECU 通過總線傳輸?shù)?ECU,根據(jù)設(shè)定的算法計(jì)算前輪角度,并將此信號傳輸?shù)睫D(zhuǎn)向電機(jī)以完成轉(zhuǎn)向。此外,ECU 通過轉(zhuǎn)向阻力傳感器獲取轉(zhuǎn)向阻力信息后,根據(jù)返回扭矩算法將返回扭矩的大小傳遞給駕駛員,用于路感反饋。
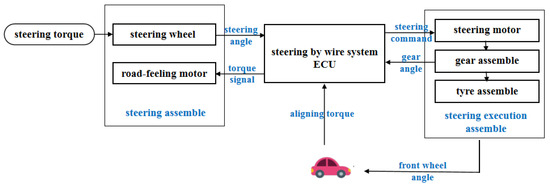
圖 2.線控轉(zhuǎn)向示意圖。
2.2. 關(guān)鍵技術(shù)
(1)容錯
電機(jī)內(nèi)出現(xiàn)開關(guān)管開路、旋轉(zhuǎn)變壓器信號異常、溫度傳感器異常等故障的概率很高,對系統(tǒng)也有重大影響。傳感器中的短路、開路和機(jī)械故障對系統(tǒng)有重大影響,但它們的發(fā)生頻率并不高[20,21,22]。通信總線中連接器接觸不良對系統(tǒng)有重大影響,發(fā)生的可能性很高[23]。目前的容錯方法從技術(shù)角度可以分為兩類:一類是基于硬件備份冗余技術(shù),另一類是基于軟件容錯算法技術(shù)。硬件冗余方式主要通過對重要組件和易受攻擊的組件提供備份來提高系統(tǒng)的容錯性能;軟件冗余方法主要依靠控制器的容錯算法來提高整個系統(tǒng)的冗余性,從而提高系統(tǒng)的容錯性能 [24u201225]。硬件備份技術(shù)和軟件容錯技術(shù)是高度互補(bǔ)的;硬件備份技術(shù)可以在硬件層面增強(qiáng)容錯控制技術(shù)的可靠性;軟件容錯技術(shù)可以減少硬件冗余導(dǎo)致的轉(zhuǎn)向系統(tǒng)的空間和體積要求。未來的線控舵系統(tǒng)將是一個高度智能的系統(tǒng),同時具有硬件備份和容錯算法[26,27u201228]。
(2)路感反饋
由于 SBW 系統(tǒng)無法為駕駛員提供固有的轉(zhuǎn)向感覺,因此存在駕駛員誤作導(dǎo)致交通事故的風(fēng)險。因此,需要路感仿真技術(shù)為駕駛員提供來自路面的反饋信息。通過方向盤上的手感獲取有關(guān)道路和方向盤的反饋信息,駕駛員可以幫助完成轉(zhuǎn)彎和變道等駕駛?cè)蝿?wù)。駕駛員在轉(zhuǎn)動方向盤時需要克服的阻力扭矩主要包括兩個方面,即返回扭矩和摩擦扭矩,而路感反饋扭矩包括返回扭矩和摩擦扭矩。要使駕駛員體驗(yàn)到逼真的路感,本質(zhì)是利用適當(dāng)?shù)牟呗裕ㄟ^上層路感電機(jī)控制來自下層電機(jī)和傳感器的數(shù)據(jù)和信息,模擬并傳遞到方向盤上,為駕駛員提供來自路面的反饋扭矩和方向盤重新對位扭矩。獲取路感反饋扭矩的方法包括參數(shù)擬合、傳感器測量和基于動力學(xué)模型的方法,其中第三種是當(dāng)前研究的主流[29,30]。回程扭矩控制技術(shù)是 SBW 系統(tǒng)質(zhì)量的評價標(biāo)準(zhǔn),也是主動轉(zhuǎn)向研究的基礎(chǔ)。本研究的核心問題是如何提高回程扭矩以達(dá)到與動力轉(zhuǎn)向系統(tǒng)相同的效果。基于動力學(xué)模型方法,根據(jù)車輛動力學(xué)響應(yīng)、駕駛員方向盤、輸入等狀態(tài),利用車輛動力學(xué)模型估計(jì)輪胎回程扭矩和需要補(bǔ)償?shù)姆答伵ぞ兀M(jìn)而計(jì)算期望的反饋扭矩指令 [31]。線控轉(zhuǎn)向系統(tǒng)具有提高控穩(wěn)定性、提高舒適性、節(jié)能環(huán)保、提高被動安全性、促進(jìn)車輛輕量化等優(yōu)點(diǎn)。然而,線控轉(zhuǎn)向系統(tǒng)的安全性和可靠性一直是阻礙其實(shí)施的核心障礙。3. 汽車線控制動系統(tǒng)
3.1. 最新技術(shù)
目前,國內(nèi)外線控制動系統(tǒng)的主要研究有電子液壓制動(EHB)系統(tǒng)、電子機(jī)械制動(EMB)系統(tǒng)和混合動力線控制動(HBBW)系統(tǒng),其中EHB系統(tǒng)最為成熟,目前處于量產(chǎn)階段[32,33,34,35]。以前,線控制動系統(tǒng)主要分為三種類型:第一種是電子液壓制動(EHB)系統(tǒng),第二種是電子機(jī)械制動(EMB)系統(tǒng),第三種是混合動力線控制動(HBBW)系統(tǒng)[36,37]。EHB系統(tǒng)是在傳統(tǒng)液壓制動系統(tǒng)的基礎(chǔ)上發(fā)展起來的,采用綜合制動系統(tǒng)模塊(電機(jī)、泵、高壓蓄能器等)取代傳統(tǒng)制動系統(tǒng)中的調(diào)壓系統(tǒng)和可產(chǎn)生和存儲制動壓力的ABS模塊,并可通過單獨(dú)調(diào)節(jié)分別調(diào)節(jié)四個輪胎的制動扭矩[38].EMB 系統(tǒng)完全消除了傳統(tǒng)制動系統(tǒng)的制動液和液壓管路等部件,由電動機(jī)驅(qū)動。制動器產(chǎn)生制動力,這是真正的線控制動系統(tǒng)。EMB 系統(tǒng)中沒有液壓驅(qū)動和控制部分,機(jī)械連接僅存在于電機(jī)和制動鉗之間。驅(qū)動部分通過電線傳輸能量,通過數(shù)據(jù)線傳輸信號[39u201240]。混合動力線控制動 (HBBW) 系統(tǒng)的主流布局是在前橋上使用電子液壓制動 (EHB) 系統(tǒng),在后橋上使用電子機(jī)械制動 (EMB) 系統(tǒng);前橋采用EHB系統(tǒng),實(shí)現(xiàn)前輪的單輪制動力調(diào)節(jié),同時依靠安裝在前橋上的EHB實(shí)施制動故障備份,滿足安全可靠要求;后橋采用EMB系統(tǒng),可縮短制動管路長度,消除壓力控制時管路過長帶來的不確定性;另一方面,它可以使電子駐車制動器 (EPB) 更加方便快捷 [41]。汽車電子液壓制動系統(tǒng)(EHB)主要由液壓控制模塊、制動踏板模塊、控制單元HCU、制動器、各種傳感器等組成[42]。EHB系統(tǒng)的工作過程主要涉及控制供壓單元和高速開關(guān)閥,產(chǎn)生和儲存制動壓力,以及分別調(diào)節(jié)四個輪胎的制動扭矩[43]。汽車電子機(jī)械制動系統(tǒng) (EMB) 主要由車輪制動模塊、中央電子控制單元 (ECU)、制動踏板模塊、通信網(wǎng)絡(luò)、電源和其他部件組成。EMB 系統(tǒng)以電子元件代替液壓元件,是一個機(jī)電一體化系統(tǒng)。系統(tǒng)通過電子控制單元控制制動電機(jī)的電流水平,并通過制動夾具從兩側(cè)夾緊摩擦盤,實(shí)現(xiàn)車輪制動。限制 EMB 系統(tǒng)大規(guī)模生產(chǎn)和應(yīng)用的關(guān)鍵技術(shù)包括冗余設(shè)計(jì)和容錯控制、夾緊力控制技術(shù)、無刷電機(jī)在復(fù)雜環(huán)境下的可靠性以及創(chuàng)新和小型化的齒輪機(jī)構(gòu)。基于 EMB 系統(tǒng)的車輛動態(tài)控制系統(tǒng),不同于基于液壓的閉環(huán)控制,需要開發(fā)一種全新的動態(tài)模型和車輛協(xié)調(diào)控制算法。圖 3 顯示了 EHB、EMB 和 HBBW 的系統(tǒng)架構(gòu)。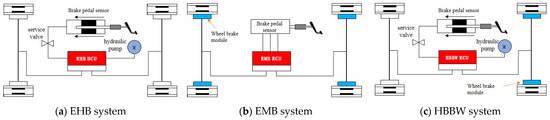
圖 3.EHB、EMB 和 HBBW 系統(tǒng)。已經(jīng)有一些成熟的算法,如PID、SMC、MPC等,成功地幫助一體化線控系統(tǒng)實(shí)現(xiàn)了動力缸壓力控制。米蘭理工大學(xué)的 Todeschini 等人為自主設(shè)計(jì)的線控制動系統(tǒng)提出了一種位置壓力混合動力開關(guān)動力缸控制策略。在位置控制模式下,他們快速控制電機(jī)完全旋轉(zhuǎn)以克服制動系統(tǒng)的怠速行程,而在壓力控制模式下,他們使用了可變參數(shù) PID。閉環(huán)控制精確調(diào)節(jié)動力缸的壓力,有效提高了該配置的主動制動系統(tǒng)的壓力調(diào)節(jié)率[44,45]。
3.2. 關(guān)鍵技術(shù)
(1)制動力的最優(yōu)分配策略
制動力分配的目的是根據(jù)車輛負(fù)載、實(shí)際路況和駕駛員踩下制動踏板瞬間的運(yùn)行條件來計(jì)算四輪制動器的制動力,以便在獲得最短制動距離的同時保證車輛的安全穩(wěn)定 [46u201247]。傳統(tǒng)液壓制動系統(tǒng)中踏板位移、踏板力、制動力之間的關(guān)系,可以從EMB系統(tǒng)中的踏板力與制動減速度的關(guān)系中推斷出來,并可以建立關(guān)系曲線。由于輪胎和路面粘附系數(shù)等因素,車輪的最大地面制動力不應(yīng)超過粘附力[48]。當(dāng)局部制動力超過粘附力時,車輪可能會出現(xiàn)抱死和打滑,可能會出現(xiàn)前輪抱死或后輪抱死等現(xiàn)象。當(dāng)汽車剎車時,輪胎不僅會滾動,還會打滑,打滑率的大小在一定程度上與粘附系數(shù)有關(guān);在理想狀態(tài)下,汽車剎車時前后制動器的制動力呈線性關(guān)系,但在實(shí)際情況下可能會有一些偏差。
(2)系統(tǒng)安全和容錯能力
EMB 系統(tǒng)的應(yīng)用一直受到安全性和可靠性的極大影響,因?yàn)槿魏坞娮有盘柕墓收隙伎赡軒頌?zāi)難性的后果。因此,系統(tǒng)安全和容錯技術(shù)尤為重要,包括軟件冗余和硬件冗余 [49u201250]。考慮到 EMB 系統(tǒng)的實(shí)時性能和成本,熱備份的動態(tài)冗余是最好的選擇。制動踏板模塊、ECU模塊、通信網(wǎng)絡(luò)和電源模塊的雙重冗余設(shè)計(jì)可以有效提高系統(tǒng)的可靠性[51]。EMB 系統(tǒng)制動踏板模塊采用雙冗余結(jié)構(gòu),兩臺相同的機(jī)器同時工作。對工作結(jié)果進(jìn)行對比,根據(jù)預(yù)定的自診斷策略和故障判斷策略輸出。4. 汽車線控驅(qū)動系統(tǒng)
4.1. 最新技術(shù)
對于內(nèi)燃機(jī)汽車,線控節(jié)氣門系統(tǒng)已經(jīng)取代了傳統(tǒng)的節(jié)氣門系統(tǒng),市場上 99% 以上的車型都配備了燃油控制門系統(tǒng)。對于新能源汽車,目前主流的驅(qū)動方案包括集中式電機(jī)驅(qū)動和步進(jìn)式電機(jī)驅(qū)動,集中式電機(jī)驅(qū)動方案已獲得大量應(yīng)用,但正在向以輪緣和輪轂電機(jī)為代表的分布式電機(jī)驅(qū)動發(fā)展 [52,53,54,55]。線控節(jié)氣門系統(tǒng)由節(jié)氣門踏板、踏板位移傳感器、電子控制單元、數(shù)據(jù)總線、伺服電機(jī)和節(jié)氣門執(zhí)行器組成。線控驅(qū)動系統(tǒng)由電子控制單元(ECU)、功率轉(zhuǎn)換器、驅(qū)動電機(jī)、機(jī)械傳動系統(tǒng)、驅(qū)動輪等組成[56]。新能源汽車線控驅(qū)動系統(tǒng)結(jié)構(gòu)主要分為集中驅(qū)動、中央傳動和分布式驅(qū)動三種。目前,電驅(qū)動橋技術(shù)、輪緣減速驅(qū)動和輪轂電機(jī)直接驅(qū)動技術(shù)是主流結(jié)構(gòu)[57,58,59]。線控節(jié)氣門由電纜或線束控制,以控制節(jié)氣門開度。從表面上看,它用一根電纜取代了傳統(tǒng)的節(jié)氣門電纜,但本質(zhì)上,它不僅僅是連接方式的簡單改變,而是可以實(shí)現(xiàn)對整車動力輸出的自動控制[60,61,62]。純電動汽車的駕駛控制是通過嵌入車輛控制器中的控制策略程序?qū)崿F(xiàn)的。根據(jù)每個傳感器的輸入信號,確定車輛的運(yùn)行條件,并確定驅(qū)動電機(jī)在每種運(yùn)行條件下的目標(biāo)扭矩 [63]。然后,通過 CAN 總線將目標(biāo)值發(fā)送給電機(jī)控制器 (MCU),電機(jī)控制器根據(jù)接收到的命令控制電機(jī),以保證車輛的正常行駛 [64]。
4.2. 關(guān)鍵技術(shù)
(1)永磁同步電機(jī)的效率提升
為了提高 NVH 性能,電動汽車驅(qū)動電機(jī)一般選擇多極、高轉(zhuǎn)速的設(shè)計(jì);由于較高的轉(zhuǎn)速導(dǎo)致較高的鐵損,普通硅鋼片在高頻區(qū)的損耗控制相對較弱。通過減小硅鋼片的厚度可以減少損耗[65,66]。使用高效硅鋼片可以減少鐵損,但仍需要優(yōu)化電機(jī)在低速、高扭矩時的銅損。一種方法是使用發(fā)卡電機(jī)。發(fā)卡電機(jī)的學(xué)名是發(fā)夾電機(jī),是一種扁線電機(jī),其繞組端部類似于發(fā)卡電機(jī)。發(fā)卡電機(jī)銅耗低,效率高。目前,豐田和典莊已經(jīng)采用了發(fā)卡電機(jī)方案 [67]。
(2)輪轂電機(jī)技術(shù)
輪轂電機(jī)驅(qū)動系統(tǒng)可靈活放置在各種電動汽車的車輪上,直接驅(qū)動輪轂旋轉(zhuǎn)。與內(nèi)燃機(jī)和單電機(jī)等傳統(tǒng)集中式驅(qū)動方式相比,其在動力配置、傳動結(jié)構(gòu)、控性能、能源利用等方面的技術(shù)優(yōu)勢和特點(diǎn)極為明顯 [68]。輪轂電機(jī)主要分為外轉(zhuǎn)子電機(jī)和內(nèi)轉(zhuǎn)子電機(jī)兩種,區(qū)別主要體現(xiàn)在有無減速結(jié)構(gòu)。內(nèi)轉(zhuǎn)子輪轂電機(jī)和輪緣電機(jī)在傳動結(jié)構(gòu)上收斂,主要區(qū)別在于內(nèi)轉(zhuǎn)子電機(jī)與輪轂集成,而輪緣電機(jī)位于輪緣上 [69]。輪轂電機(jī)驅(qū)動裝置的示意圖如圖 4 所示。總體來看,輪轂電機(jī)的應(yīng)用具有集成度高、驅(qū)動靈活、符合智能汽車發(fā)展和平臺泛化應(yīng)用等優(yōu)點(diǎn) [70]。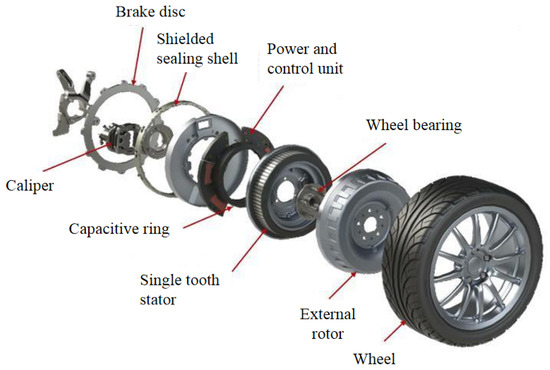
圖 4.輪轂電機(jī)驅(qū)動示意圖。材料和工藝創(chuàng)新可能會突破輪轂電機(jī)中電磁負(fù)載對電機(jī)體積的限制。進(jìn)一步研發(fā)高磁導(dǎo)率、低損耗磁性材料、低電阻率導(dǎo)電材料、高導(dǎo)熱絕緣材料以及低密度、高強(qiáng)度結(jié)構(gòu)材料,可以減少電機(jī)損耗和質(zhì)量,改善電機(jī)內(nèi)部的熱傳遞,并提高輪轂電機(jī)中的功率/扭矩密度。電機(jī)加工的創(chuàng)新將通過不同的工藝結(jié)構(gòu),在基于現(xiàn)有材料的電機(jī)中實(shí)現(xiàn)低損耗、輕量化和高冷卻效率的設(shè)計(jì)。未來,電機(jī)設(shè)計(jì)將不再是簡單的電磁或結(jié)構(gòu)設(shè)計(jì),而是真正的多學(xué)科設(shè)計(jì),不斷突破電機(jī)性能的極限。
(3)
電機(jī)控制器
碳化硅 (SiC) 由于其強(qiáng)大的帶隙、導(dǎo)熱性和絕緣能力,非常適合作為功率半導(dǎo)體的材料。與硅 (Si) 基器件相比,它更容易實(shí)現(xiàn)低損耗、高開關(guān)頻率和高結(jié)溫,并且溫度升高對開關(guān)損耗的影響很小 [71]。其良好的輸出特性更適合牽引條件。雖然高成本是其面臨的主要障礙,但隨著材料價格的下降和生產(chǎn)工藝的改進(jìn),SiC器件將在高效運(yùn)行、節(jié)省元件和芯片等維度上降低電控產(chǎn)品的成本 [72,73,74,75]。5. 線控系統(tǒng)汽車懸架
5.1. 最新技術(shù)
在車輛駕駛和騎行過程中,控性和舒適性是兩個重要的評價指標(biāo),很難平衡。線懸架控制是根據(jù)實(shí)際路況自動調(diào)節(jié)懸架的高度、剛度和阻尼,以實(shí)現(xiàn)對駕駛姿態(tài)的精確控制的過程 [76]。根據(jù)執(zhí)行器,從技術(shù)成熟度和設(shè)備率來看,空氣彈簧和 CDC 型線控減震器是最常見的。MRC減震器減震效果好,響應(yīng)速度快[77,78]。后期降價后會有很好的發(fā)展空間。由于其替代性強(qiáng),配備線控防傾桿的必要性相對較低。圖 5 說明了空氣懸架系統(tǒng)的基本結(jié)構(gòu)。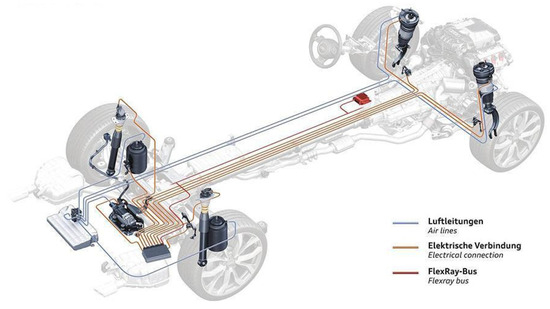
圖 5.空氣懸架的基本結(jié)構(gòu)。根據(jù)額外外力干預(yù)的程度,汽車懸架系統(tǒng)可分為以下幾類:被動、半主動和完全主動。半主動控制的成本低于全主動控制,其性能接近全主動懸架系統(tǒng),并且具有可靠的故障狀態(tài)適應(yīng)性,是當(dāng)前市場的主流 [79]。隨著自動駕駛水平的提高和各種傳感器的接入,全主動懸架的普及程度將與日俱增 [80]。線控懸架系統(tǒng)通常有兩套并聯(lián)的信息采集和控制系統(tǒng),解決不同路況下不同系統(tǒng)的控制耦合是其控制難點(diǎn);目前主流的控制方案是線控彈簧一般在穩(wěn)態(tài)下調(diào)整,線控減振一般是實(shí)時調(diào)整的。線控懸架控制系統(tǒng)是一個閉環(huán)自適應(yīng)控制系統(tǒng),沒有最佳解決方案。在標(biāo)定過程中,需要根據(jù)仿真模型和實(shí)際車輛測試結(jié)果對核心參數(shù)進(jìn)行持續(xù)標(biāo)定。PID(proportional, integral, differential)控制是控制領(lǐng)域中應(yīng)用最廣泛、最成熟的控制方法,廣泛應(yīng)用于車輛的主動和半主動懸架[81]。通過仿真測試和實(shí)車測試,可以實(shí)現(xiàn)比例(單次調(diào)整幅度)、積分(消除靜態(tài)誤差)和微分(反映輸入信號變化趨勢)參數(shù)的調(diào)整。
5.2. 容錯的關(guān)鍵技術(shù)
當(dāng)線控懸架系統(tǒng)發(fā)生故障時,PID 懸架前期設(shè)定的 Kp、Ki、Kd 參數(shù)為固定值,無法快速適應(yīng)變化。因此,需要一種容錯機(jī)制來對控制信號執(zhí)行增益和補(bǔ)償處理。被動容錯控制主要針對預(yù)先已知的故障類型設(shè)計(jì)固定和不變的容錯控制律,使系統(tǒng)對預(yù)設(shè)故障(如傳感器故障)不敏感[82]。這種方法不需要對故障進(jìn)行預(yù)診斷或?qū)崟r調(diào)整控制規(guī)律,實(shí)施時間和成本相對較低。主動容錯系統(tǒng)的理論基礎(chǔ)是 FDD(故障自檢反饋系統(tǒng))。當(dāng)系統(tǒng)發(fā)生故障時,診斷單元對其進(jìn)行檢測和診斷,并控制反饋/前饋控制器以獲得適當(dāng)?shù)娜蒎e控制律,確保閉環(huán)系統(tǒng)的穩(wěn)定性。在主動容錯控制系統(tǒng)的實(shí)現(xiàn)過程中,首先建立系統(tǒng)模型,并在此基礎(chǔ)上建立系統(tǒng)故障模型:根據(jù)系統(tǒng)特性設(shè)計(jì)FDD系統(tǒng),然后根據(jù)補(bǔ)償規(guī)則設(shè)計(jì)容錯控制律。線控懸架除了常規(guī)的底盤支撐和減震外,由于其良好的負(fù)載適應(yīng)性和較低的固有頻率,已擴(kuò)展到商用車的駕駛室和座椅,大大提高了長途駕駛舒適性和抗疲勞能力。線控懸架可以滿足不同工況下行駛平穩(wěn)性和車輛控性的要求。但由于其結(jié)構(gòu)復(fù)雜,對整車的故障率、安全風(fēng)險和能耗有一定的負(fù)面影響。6. 討論線控底盤技術(shù)是一種先進(jìn)的汽車技術(shù),依靠電子控制系統(tǒng)來調(diào)節(jié)車輛的底盤,有可能提高車輛的控性能、舒適性和安全性。通過線控系統(tǒng)對底盤的介紹,可以全面回顧線控轉(zhuǎn)向、制動、驅(qū)動和懸架系統(tǒng)的關(guān)鍵技術(shù)和發(fā)展現(xiàn)狀,闡明各系統(tǒng)的現(xiàn)狀和需要改進(jìn)的領(lǐng)域。為了進(jìn)一步開發(fā)底盤線控轉(zhuǎn)向系統(tǒng),可以在以下領(lǐng)域取得進(jìn)展:線控轉(zhuǎn)向技術(shù)的安全性和可靠性長期以來一直是其實(shí)施的根本障礙,這可以通過硬件冗余和容錯算法來改進(jìn)。未來的線控轉(zhuǎn)向系統(tǒng)有望成為集成硬件冗余和容錯算法的高度智能平臺。隨著技術(shù)的進(jìn)步和車輛控制系統(tǒng)的不斷升級,線控轉(zhuǎn)向技術(shù)將逐漸成為汽車行業(yè)的主流趨勢。人工智能、車聯(lián)網(wǎng)和自動駕駛等新興技術(shù)的應(yīng)用將進(jìn)一步提高線控轉(zhuǎn)向系統(tǒng)的智能性。生產(chǎn)線控制的動態(tài)系統(tǒng)可分為 EHB 和 EMB。預(yù)計(jì) EHB 將在未來相當(dāng)長的一段時間內(nèi)成為主流方案,而 EMB 可能會因冗余和備份挑戰(zhàn)等問題在短期內(nèi)遇到商業(yè)化困難。另一個突出的特點(diǎn)是輪轂電機(jī)系統(tǒng),它具有簡化車輛架構(gòu)、增加可用空間和提高傳動效率的明顯優(yōu)勢,同時將轉(zhuǎn)向、制動和驅(qū)動功能集成到一個系統(tǒng)中。此外,在懸架方面,它可以靈活地調(diào)整懸架系統(tǒng)的車身高度和剛度,以提高車輛的通過性或控性能。7. 結(jié)論汽車底盤控制技術(shù)是指負(fù)責(zé)控制和管理車輛底盤的運(yùn)動、穩(wěn)定性和性能的各種系統(tǒng)和組件。這些技術(shù)在確保車輛的安全性、舒適性和整體駕駛體驗(yàn)方面發(fā)揮著至關(guān)重要的作用。
(1)線控轉(zhuǎn)向:目前,線控轉(zhuǎn)向系統(tǒng)的技術(shù)主要處于研發(fā)階段。從整車廠的角度來看,只有英菲尼迪 Q50 在量產(chǎn)中配備了這項(xiàng)技術(shù),泛亞和同濟(jì)大學(xué)共同進(jìn)行前期研發(fā),沒有與零部件制造商合作。從供應(yīng)商的角度來看,博世、采埃孚等廠商正在積極研發(fā)和制作樣品,但尚未在整車上配備。博世的線控轉(zhuǎn)向系統(tǒng)采用雙冗余、全備份方案。
(2)線控制動:目前市場上推出控制技術(shù)的主流路線是電子液壓制動 (EHB) 系統(tǒng),并且已經(jīng)有幾款量產(chǎn)產(chǎn)品,例如博世的 iBooster 和大陸的 MK C1。由于技術(shù)不成熟,電子機(jī)械制動 (EMB) 系統(tǒng)仍處于研發(fā)階段。
(3)線控駕駛:對于傳統(tǒng)的內(nèi)燃機(jī)汽車,線控驅(qū)動技術(shù)(throttle-by-wire)目前廣泛應(yīng)用于乘用車和商用車,市場份額超過 99%;在新能源汽車方面,線控驅(qū)動技術(shù)已得到全面應(yīng)用,目前處于電機(jī)集中驅(qū)動階段。隨著電動化水平的提高,未來將向以輪緣電機(jī)和輪轂電機(jī)為代表的分布式驅(qū)動發(fā)展。
線控懸架:雖然線控懸架可以自動調(diào)節(jié)線控彈簧的剛度、車身高度和減震器阻尼,但出于重量、成本和可靠性等原因,目前屬于非剛性配置,主要配備在 C 級和 D 級車輛上。因此,對于汽車制造商來說,線控減震器的裝配優(yōu)先級最高,其次是線控彈簧,最后是線控防傾桿。就發(fā)展?jié)摿Χ裕K控制空氣彈簧和 CDC/MRC 型生產(chǎn)線是可能的。可控減震器的未來發(fā)展前景比較好。

評論