實(shí)驗(yàn)20:步進(jìn)電機(jī)2

實(shí)驗(yàn)?zāi)康?/h2>實(shí)驗(yàn)任務(wù)
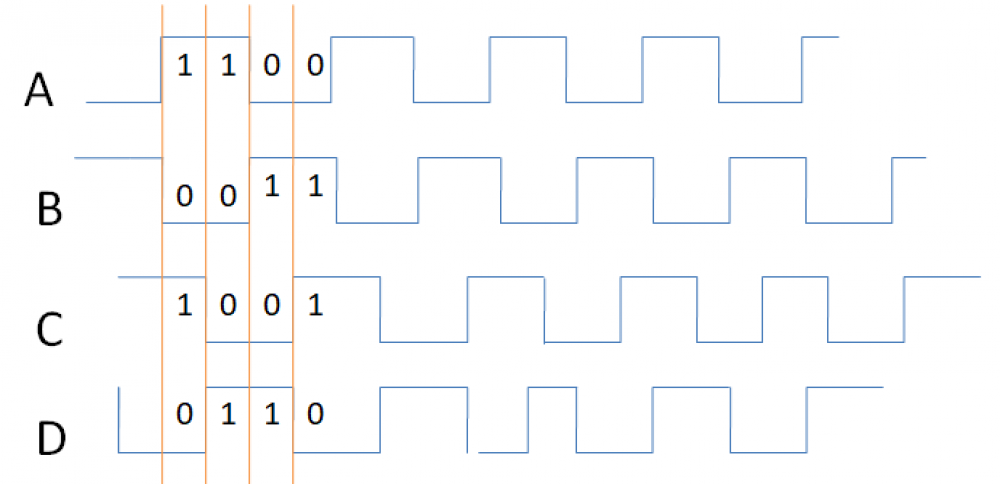
本實(shí)驗(yàn)的任務(wù)設(shè)計(jì)一個(gè)步進(jìn)電機(jī)運(yùn)行控制電路,A、B、C、D分別表示步進(jìn)電機(jī)的四相繞組,步進(jìn)電機(jī)按四相四拍的方式運(yùn)行。如要求電機(jī)正傳時(shí),控制端T=1,電機(jī)的四相繞組的通電順序?yàn)锳C—DA—BD—CB—AC……如要求電機(jī)反傳時(shí),控制端T=0,電機(jī)的四相繞組的通電順序?yàn)锳C—CB—BD—DA—AC……。
本文引用地址:http://www.104case.com/article/202310/451510.htm實(shí)驗(yàn)原理
為了實(shí)現(xiàn)上述設(shè)計(jì)要求,我們可以將T作為判斷電機(jī)正轉(zhuǎn)和反轉(zhuǎn)的條件。
當(dāng)T = 1時(shí),電機(jī)的四相繞組的通電順序?yàn)锳C(1010)—DA(1001)—BD(0101)—CB(0110)—AC(1010)。
當(dāng)T = 0時(shí),電機(jī)的四相繞組的通電順序?yàn)锳C(1010)—CB(0110)—BD(0101)—DA(1001)—AC(1010)。由此我們可以認(rèn)為四相的順序?yàn)锳-C-B-D
Verilog HDL建模描述
設(shè)計(jì)文件 stepmotor2.v
module stepmotor2(input wire clk,rst,input wire dir, //控制端 1:正轉(zhuǎn) 0:反轉(zhuǎn)output wire [3:0] led //四相控制對(duì)應(yīng)的led,A(led[0]),B(led[1]),C(led[2]),D(led[3]));wire clk1h; //1秒時(shí)鐘reg [3:0] ctrl; //DCBA四相控制 parameter S1 = 2'b00, //電機(jī)步進(jìn)狀態(tài) AC
S2 = 2'b01, //DA
S3 = 2'b10, //BD
S4 = 2'b11; //CB reg [1:0] cur_state,next_state; divide #( //產(chǎn)生1秒時(shí)鐘信號(hào).WIDTH(24),.N(12000000)) u1(.clk(clk),.rst_n(rst),.clkout(clk1h));always@(posedge clk1h or negedge rst) //第一段
if(!rst)
cur_state <= S1;
else
cur_state <= next_state;always@(cur_state or rst or dir) //第二段,狀態(tài)轉(zhuǎn)移,dir控制方向
if(!rst)
begin
next_state = S1;
end
else
begin
if(dir) //當(dāng)控制端為1,正轉(zhuǎn)
case(cur_state)
S1:next_state = S2; //正轉(zhuǎn)S1-S2-S3-S4-S1
S2:next_state = S3;
S3:next_state = S4;
S4:next_state = S1;
endcase
else //當(dāng)控制端為0,反轉(zhuǎn)
case(cur_state)
S1:next_state = S4; //反轉(zhuǎn)S1-S4-S3-S2-S1
S2:next_state = S1;
S3:next_state = S2;
S4:next_state = S3;
endcase
endalways@(posedge clk1h or negedge rst) //第三段,當(dāng)前狀態(tài)輸出
if(!rst)
begin
ctrl <= 4'b0101;
end
else
begin
case(next_state)
S1: ctrl <= 4'b0101; //AC
S2: ctrl <= 4'b1001; //DA
S3: ctrl <= 4'b1010; //DB
S4: ctrl <= 4'b0110; //CB
default: ctrl <= 4'b0101;
endcase
endassign led = ctrl; //狀態(tài)輸出動(dòng)作對(duì)應(yīng)的ledendmodule
實(shí)驗(yàn)步驟
當(dāng)撥碼開(kāi)關(guān)M7置1時(shí),會(huì)按照ABCD按照10101001010101101010的順序正向循環(huán)。
當(dāng)撥碼開(kāi)關(guān)M7置0時(shí),會(huì)按照ABCD按照10100110010110011010的順序反向循環(huán)。
當(dāng)任一時(shí)刻,rst所連接的按鍵開(kāi)關(guān)置0,則回到1010狀態(tài),正向或反向則取決于此刻的M7值。
本實(shí)驗(yàn)的任務(wù)設(shè)計(jì)一個(gè)步進(jìn)電機(jī)運(yùn)行控制電路,A、B、C、D分別表示步進(jìn)電機(jī)的四相繞組,步進(jìn)電機(jī)按四相四拍的方式運(yùn)行。如要求電機(jī)正傳時(shí),控制端T=1,電機(jī)的四相繞組的通電順序?yàn)锳C—DA—BD—CB—AC……如要求電機(jī)反傳時(shí),控制端T=0,電機(jī)的四相繞組的通電順序?yàn)锳C—CB—BD—DA—AC……。
本文引用地址:http://www.104case.com/article/202310/451510.htm為了實(shí)現(xiàn)上述設(shè)計(jì)要求,我們可以將T作為判斷電機(jī)正轉(zhuǎn)和反轉(zhuǎn)的條件。
當(dāng)T = 1時(shí),電機(jī)的四相繞組的通電順序?yàn)锳C(1010)—DA(1001)—BD(0101)—CB(0110)—AC(1010)。
當(dāng)T = 0時(shí),電機(jī)的四相繞組的通電順序?yàn)锳C(1010)—CB(0110)—BD(0101)—DA(1001)—AC(1010)。由此我們可以認(rèn)為四相的順序?yàn)锳-C-B-D
設(shè)計(jì)文件 stepmotor2.v
module stepmotor2(input wire clk,rst,input wire dir, //控制端 1:正轉(zhuǎn) 0:反轉(zhuǎn)output wire [3:0] led //四相控制對(duì)應(yīng)的led,A(led[0]),B(led[1]),C(led[2]),D(led[3]));wire clk1h; //1秒時(shí)鐘reg [3:0] ctrl; //DCBA四相控制 parameter S1 = 2'b00, //電機(jī)步進(jìn)狀態(tài) AC S2 = 2'b01, //DA S3 = 2'b10, //BD S4 = 2'b11; //CB reg [1:0] cur_state,next_state; divide #( //產(chǎn)生1秒時(shí)鐘信號(hào).WIDTH(24),.N(12000000)) u1(.clk(clk),.rst_n(rst),.clkout(clk1h));always@(posedge clk1h or negedge rst) //第一段 if(!rst) cur_state <= S1; else cur_state <= next_state;always@(cur_state or rst or dir) //第二段,狀態(tài)轉(zhuǎn)移,dir控制方向 if(!rst) begin next_state = S1; end else begin if(dir) //當(dāng)控制端為1,正轉(zhuǎn) case(cur_state) S1:next_state = S2; //正轉(zhuǎn)S1-S2-S3-S4-S1 S2:next_state = S3; S3:next_state = S4; S4:next_state = S1; endcase else //當(dāng)控制端為0,反轉(zhuǎn) case(cur_state) S1:next_state = S4; //反轉(zhuǎn)S1-S4-S3-S2-S1 S2:next_state = S1; S3:next_state = S2; S4:next_state = S3; endcase endalways@(posedge clk1h or negedge rst) //第三段,當(dāng)前狀態(tài)輸出 if(!rst) begin ctrl <= 4'b0101; end else begin case(next_state) S1: ctrl <= 4'b0101; //AC S2: ctrl <= 4'b1001; //DA S3: ctrl <= 4'b1010; //DB S4: ctrl <= 4'b0110; //CB default: ctrl <= 4'b0101; endcase endassign led = ctrl; //狀態(tài)輸出動(dòng)作對(duì)應(yīng)的ledendmodule
當(dāng)撥碼開(kāi)關(guān)M7置1時(shí),會(huì)按照ABCD按照10101001010101101010的順序正向循環(huán)。
當(dāng)撥碼開(kāi)關(guān)M7置0時(shí),會(huì)按照ABCD按照10100110010110011010的順序反向循環(huán)。
當(dāng)任一時(shí)刻,rst所連接的按鍵開(kāi)關(guān)置0,則回到1010狀態(tài),正向或反向則取決于此刻的M7值。











評(píng)論