實驗19:步進電機1

實驗目的
實驗任務
本實驗的任務是設計控制四相繞組的步進電機電機正轉、反轉、停止的控制電路。要求如下:
電機運轉規律為:正轉30s→停10s→反轉30s→停10s→正轉30s……
實驗原理
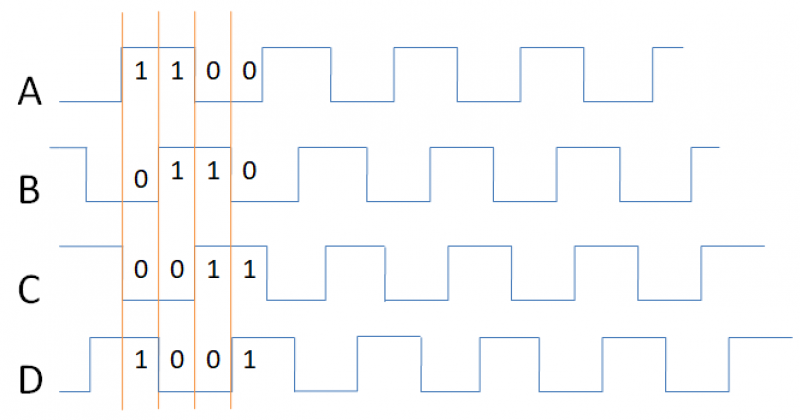
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元步進電機件。當電流流過定子繞組時,定子繞組產生一矢量磁場。該磁場會帶動轉子旋轉一角度,使得轉子的一對磁場方向與定子的磁場方向一致。當定子的矢量磁場旋轉一個角度。轉子也隨著該磁場轉一個角度。每輸入一個電脈沖,電動機轉動一個角度前進一步。它輸出的角位移與輸入的脈沖數成正比、轉速與脈沖頻率成正比。改變繞組通電的順序,電機就會反轉。按照實驗要求,我們可以將電機四相的時序圖畫出,用1代表高電平,用0代表低電平。則四相步進電機的工作狀態可以分成四個:狀態1:1001 ;狀態2:1100;狀態3:0110;狀態4:0011 。正轉:狀態1~4,反轉狀態4~1。根據要求中的正轉30s→停10s→反轉30s→停10s→正轉30s,我們可以將周期設為40s(其中高電平30s,低電平10s),占空比為3/4。
Verilog HDL建模描述
設計文件 stepmotor1.v
module stepmotor1(input wire clk,rst,output wire [5:0] led); wire clk1h; //1秒時鐘reg [5:0] dir; //電機轉動方向控制。正轉000111,反轉111000,停止000000reg [5:0] timecont; //計時 parameter S1 = 2'b00, //電機工作狀態 正轉 S2 = 2'b01, //停止 S3 = 2'b10, //反轉 S4 = 2'b11; //停止 parameter TIME_S1 = 6'd30, //正轉計時30秒 TIME_S2 = 6'd10, //停止計時10秒 TIME_S3 = 6'd30; //反轉計時30秒 reg [1:0] cur_state,next_state; divide #( //產生1秒時鐘信號.WIDTH(24),.N(12000000)) u1(.clk(clk),.rst_n(rst),.clkout(clk1h)); always@(posedge clk1h or negedge rst) //第一段 if(!rst) cur_state <= S1; else cur_state <= next_state; always@(cur_state or rst or timecont) //第二段,狀態轉移 if(!rst) begin next_state = S1; end else begin case(cur_state) //判斷當前狀態 S1:begin if(timecont == 1) //計時結束跳轉到S2,否則保持S1 next_state = S2; else next_state = S1; end S2:begin if(timecont == 1) //計時結束跳轉到S3,否則保持S2 next_state = S3; else next_state = S2; end S3:begin if(timecont == 1) //計時結束跳轉到S4,否則保持S3 next_state = S4; else next_state = S3; end S4:begin if(timecont == 1) //計時結束跳轉到S1,否則保持S4 next_state = S1; else next_state = S4; end default:next_state = next_state; endcase end always@(posedge clk1h or negedge rst) //第三段,當前狀態輸出 if(!rst) begin timecont <= TIME_S1; dir <= 6'b000111; end else begin case(next_state) S1:begin dir <= 6'b000111; //正轉狀態輸出 if(timecont == 1) //計時控制 timecont <= TIME_S1; //計時結束賦新的值 else timecont <= timecont - 1;//計時減1 end S2:begin dir <= 6'b000000; if(timecont == 1) timecont <= TIME_S2; else timecont <= timecont - 1; end S3:begin dir <= 6'b111000; if(timecont == 1) timecont <= TIME_S3; else timecont <= timecont - 1; end S4:begin dir <= 6'b111000; if(timecont == 1) timecont <= TIME_S2; else timecont <= timecont - 1; end default:begin dir <= 6'b000111; timecont <= TIME_S1; end endcase endassign led = dir; //狀態輸出動作對應的led endmodule
實驗步驟
開發板上的四個led會按照10011100011000111001的順序正向循環30s后暫停10s,然后繼續從暫停處開始按照10010011011011001001的順序反向循環30s后暫停10s,再繼續從暫停處開始正向循環,以此往復。在任一時刻,按下rst所連接的按鍵開關,將rst置0,則循環會回到初始1001狀態開始正向循環。











評論